... is a state-of-the-art SLAM system for RGB-D cameras, e.g., the Microsoft Kinect or the Asus Xtion Pro Live. You can use it to create 3D point clouds or OctoMaps.
RGBDSLAMv2 is based on the open source projects, ROS, OpenCV, OpenGL, PCL, OctoMap, SiftGPU, g2o, and more - Thanks!
A journal article with a system description and performance evaluation can be found in the following publication:
"3D Mapping with an RGB-D Camera",
F. Endres, J. Hess, J. Sturm, D. Cremers, W. Burgard,
IEEE Transactions on Robotics, 2014.
Additional information can be found here:
- www.informatik.uni-freiburg.de/~endres
- http://www.ros.org/wiki/rgbdslam
- http://answers.ros.org/questions/tags:rgbdslam
- Ubuntu 14.04
- ROS indigo
-
Put RGBDSLAMv2 in a catkin workspace: See the catkin tutorial for details. Use git to clone this repository into your workspace's "src/" directory. Or download RGBDSLAMv2 as an archive and extract it to "src/".
-
Use rosdep (i.e. "rosdep install rgbdslam") to install missing dependencies. For details see http://wiki.ros.org/ROS/Tutorials/rosdep
-
To build RGBDSLAMv2 go to your catkin workspace and execute "catkin_make". If you get an error about the missing siftgpu library, execute "catkin_make" again.
##Installation from Scratch ##################################################### This walkthrough is is hardly tested, so watch out for problems. Assuming you have installed ROS indigo on Ubuntu 14.04, issue the following commands in a terminal (copy-paste should work)
#Prepare Workspace
source /opt/ros/indigo/setup.bash
mkdir -p ~/rgbdslam_catkin_ws/src
cd ~/rgbdslam_catkin_ws/src
catkin_init_workspace
cd ~/rgbdslam_catkin_ws/
catkin_make
source devel/setup.bash
#Get RGBDSLAM
cd ~/rgbdslam_catkin_ws/src
wget -q http://github.com/felixendres/rgbdslam_v2/archive/indigo.zip
unzip -q indigo.zip
cd ~/rgbdslam_catkin_ws/
#Install
rosdep update
rosdep install rgbdslam
catkin_make
See the sections below for more details on the usage. But to get you started quickly here's the most important pointers:
-
If you want to use RGBDSLAMv2 with an RGB-D camera you may have to install openni (sudo apt-get install ros-indigo-openni-launch).
-
Check out the launch files in "launch/" for examples and specific use cases. roslaunch rgbdslam openni+rgbdslam.launch is a good starting point for live mapping.
-
Check out the README in "test/" for running, testing and evaluating RGBDSLAMv2 on Juergen Sturm's RGB-D SLAM Dataset and Benchmark: http://vision.in.tum.de/data/datasets/rgbd-dataset You need cython for the evaluation scripts (sudo apt-get install cython).
-
If you want to use SURF or SIFT, you will need to build OpenCV from source, including the non-free module (this does not include SIFTGPU, which is included, but needs to be enabled in CMakeLists.txt). In the CMakeLists.txt of RGBDSLAMv2 you can set the build directory of OpenCV and enable the non-free functionality. Note that SIFT and SURF are not the best choice. Due to new (software) features in RGBDSLAMv2, ORB outperforms both.
This software is an update of the ROS Fuerte version of RGBDSLAM. However many things have changed, so some of the DOCUMENTATION BELOW MAY BE OUTDATED. Please report problems with the documentation. Thanks.
There are several example launch-files that set the parameters of RGB-D SLAM for certain use cases. For a definitive list of all settings and their default settings have a look at their quite readable definition in src/parameter_server.cpp or (with the current settings instead of the default) in the GUI Menu Settings->View Current Settings.
The various use-case launch-files might not work correctly yet, as they are not regularly tested. You should get them running if you fiddle with the topics ("rostopic list" and "rosnode info" will help you. "rqt_graph" is great too).
Most people seem to want the registered point cloud. It is by default sent out on /rgbdslam/batch_clouds when you command RGB-D SLAM to do so (see below). The clouds sent are actually the same as before, but the according transformation - by default from /map to /openni_camera - is sent out on /tf.
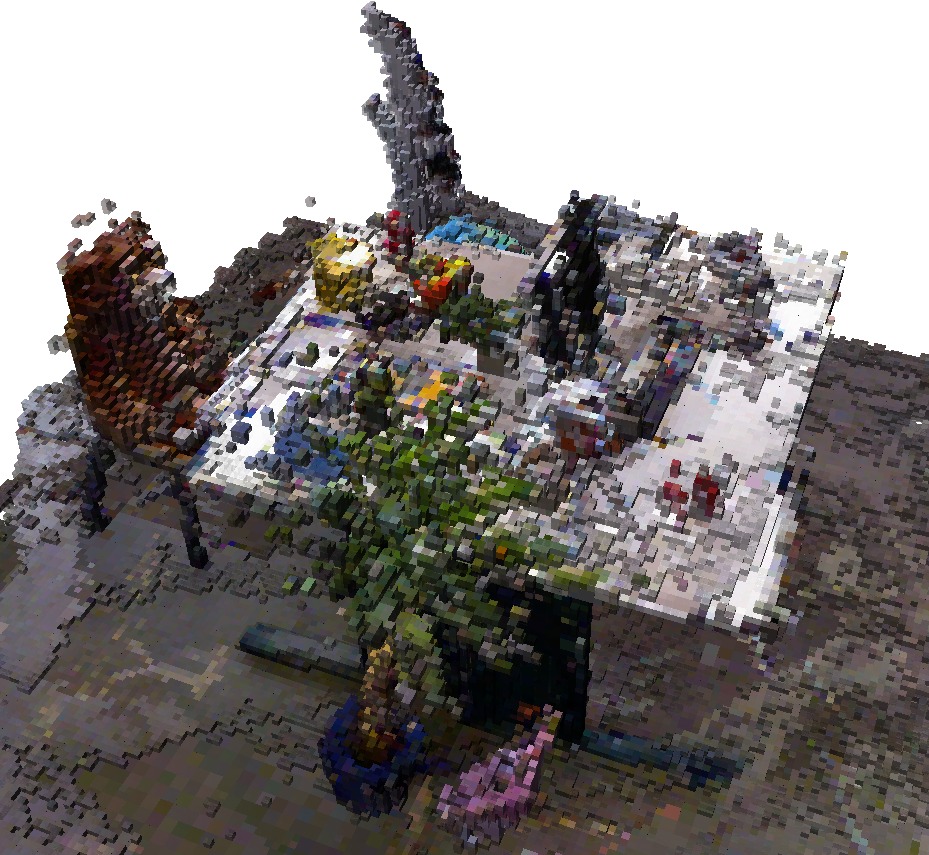
The octoMap library is compiled into the rgbdslam node. This allows to create the octomap directly. In the GUI this can be done by selecting "Save Octomap" from the "Data" Menu. Online octomapping is possible, but not recommended.
To start RGBDSLAMv2 launch, e.g., $ roslaunch rgbdslam openni+rgbdslam.launch
Alternatively you can start the openni nodes and RGBDSLAMv2 separately, e.g.: roslaunch openni_camera openni_node.launch roslaunch rgbdslam rgbdslam.launch
To capture models either press space to start recording a continuous stream or press enter to record a single frame. To reduce data redundancy, sequential frames from (almost) the same position are not included in the final model.
Parameters RGBDSLAMv2 is customizable by parameters. These should be set in the launch file. Parameters can be changed during operation from the GUI, however, changes from the GUI may have no effect for many parameters.
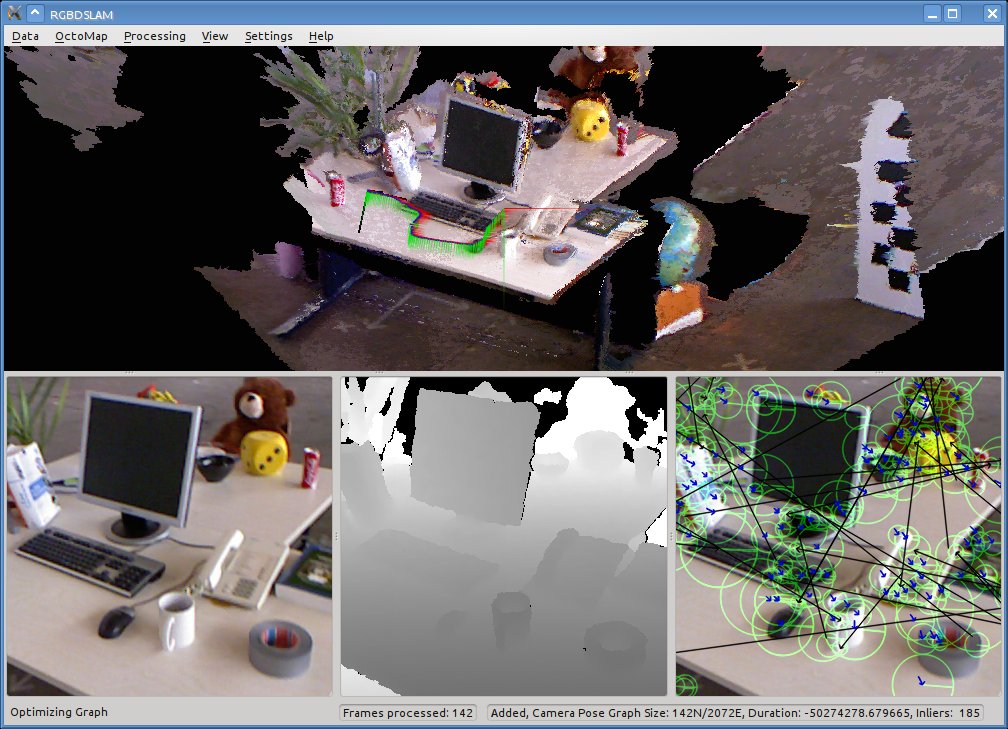
Visualization The 3D visualization shows the globally optimized model (you might have to click into it to update the view after optimization). Neighbouring points can be triangulated except at missing values and depth jumps. With the shortcut "t", triangulation can be toggled. Since raw points render slightly faster the parameter "cloud_display_type" controls whether triangulation is computed at all - at the time the cloud is received. The parameter "gl_point_size" may be useful to most users.
The RosUI is an alternative to the Grapical_UI to run the rgbdslam headless, for example on the PR2. rgbdslam can then be used via service-calls. The possible calls are:
- /rgbdslam/ros_ui {reset, quick_save, send_all, delete_frame, optimize, reload_config, save_trajectory}
- /rgbdslam/ros_ui_b {pause, record} {true, false}
- /rgbdslam/ros_ui_f {set_max} {float}
- /rgbdslam/ros_ui_s {save_octomap, save_cloud, save_g2o_graph, save_trajectory, save_features, save_individual} {filename}
To start the rgbdslam headless use the headless.launch: $ roslaunch rgbdslam headless.launch
Capture single frames via: $ rosservice call /rgbdslam/ros_ui frame
Capture a stream of data: $ rosservice call /rgbdslam/ros_ui_b pause false
Send point clouds with computed transformations (e.g., to rviz or octomap_server): $ rosservice call /rgbdslam/ros_ui send_all
Save data using one of the following:
All pointclouds in one file quicksave.pcd in rgbdslam/bin-directory: $ rosservice call /rgbdslam/ros_ui_s save_cloud
Every pointcloud in its own file in rgbdslam/bin-directory: $ rosservice call /rgbdslam/ros_ui save_individual
/rgbdslam/ros_ui:
- reset ''resets the graph, delets all nodes (refreshes only when capturing new images)''
- frame ''capture one frame from the sensor''
- optimize ''trigger graph optimizer''
- reload_config ''reloads the paramters from the ROS paramter server''
- quick_save ''saves all pointclouds in one file quicksave.pcd in rgbdslam/bin-directory''
- send_all ''sends all pointclouds to /rgbdslam/transformed_cloud (can be visualized with rviz)''
- delete_frame ''delete the last frame from the graph (refreshes only when capturing new images)''
/rgbdslam/ros_ui_b:
- pause ''pauses or resumes the capturing of images''
- record ''pauses or stops the recording of bag-files, can be found in the rgbdslam/bin-directory''
/rgbdslam/ros_ui_f:
- set_max ''filters out all datapoints further away than this value (in cm, only for saving to files)''
/rgbdslam/ros_ui_s:
- save_features ''saves the feature locations and descriptors in a yaml file with the given filename''
- save_cloud ''saves the cloud to the given filename (should end with .ply or .pcd)''
- save_individual ''saves every scan in its own file (appending a suffix to the given prefix)''
- save_octomap ''saves the cloud to the given filename''
- save_trajectory ''saves the sensor trajectory to the file _estimate.txt''
The compilation may take a lot of memory, particularly if the environment variable $ROS_PARALLEL_JOBS is set.
If you are located in Germany and get errors loading the saved ply files into meshlab, try switching to U.S. locale or replace the decimal point with a comma in your .ply file
If you have questions regarding installation or usage of RGBDSLAM please refer to http://answers.ros.org/questions/?tags=RGBDSLAM For further questions, suggestions, corrections of this README or to submit patches, please contact Felix Endres ([email protected]).
Apart from this manual, code documentation can be created using rosdoc ("rosrun rosdoc rosdoc rgbdslam"), which will create a "doc" folder in your current directory.
If there are problems related to the compilation or linking of GICP or SIFTGPU, you can deactivate these features at the top of CMakeLists.txt. You might get even faster GPU features setting the parameter "siftgpu_with_cuda" but you will need to install the proprietary CUDA drivers that may require a NVidia GPU (see http://www.nvidia.com/object/cuda_gpus.html). For installing the development drivers and the CUDA SDK you can use the following tutorial: http://sublimated.wordpress.com/2011/03/25/installing-cuda-4-0-rc-on-ubuntu-10-10-64-bit/ or for ubuntu 10.04: http://ubuntuforums.org/showthread.php?t=1625433 (tested on Ubuntu 10.04 x64) To use SiftGPU you should install "libdevil-dev".
Additional compiling information can be changed in external/siftgpu/linux/makefile.
If you get an error that the siftgpu library is not found, execute "make" manually in the directory external/siftgpu/ and rerun catkin_make.
GICP Generalized ICP can be (de)activated for refining the registration. For more information see http://stanford.edu/~avsegal/generalized_icp.html
This software is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
RGBDSLAM is licenced under GPL v.3. See the accompanying file "COPYING".