diff --git a/jsk_spot_robot/jsk_spot.rosinstall b/jsk_spot_robot/jsk_spot.rosinstall
index 55d4258041..25c0e11aa0 100644
--- a/jsk_spot_robot/jsk_spot.rosinstall
+++ b/jsk_spot_robot/jsk_spot.rosinstall
@@ -24,12 +24,12 @@
local-name: jsk-ros-pkg/jsk_3rdparty
uri: https://github.com/jsk-ros-pkg/jsk_3rdparty.git
version: master
-# Until https://github.com/jsk-ros-pkg/jsk_common/pull/1685 is merged, this patch is
-# required to build spoteus_demo
+# Until sktometometo/feature/add-tf-relay-package is merged, this patch is
+# required for spot_basic_behaviors
- git:
local-name: jsk-ros-pkg/jsk_common
uri: https://github.com/sktometometo/jsk_common.git
- version: PR/update-download-data
+ version: feature/add-tf-relay-package
# This is a develop branch for jsk version.
# We need to use it until it is merged to master
- git:
diff --git a/jsk_spot_robot/jsk_spot_behaviors/README.md b/jsk_spot_robot/jsk_spot_behaviors/README.md
new file mode 100644
index 0000000000..1e86f5dc3d
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/README.md
@@ -0,0 +1,49 @@
+# jsk_spot_behaviors
+
+These packages enable for Spot to execute locomotoion behaviors to reach a desired position.
+
+## Concept
+
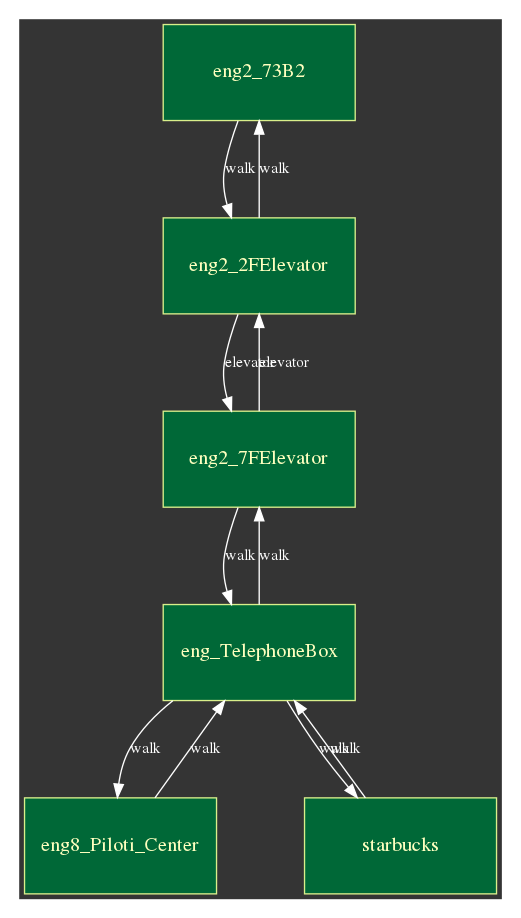
+In this framework, knowledge about positions and transtion behaviors between them are represented as a digraph like below.
+
+Each node represents specified positions and each edge represents a behavior to transition between them.
+
+
+
+A graph is defined by a yaml file ( e.g. [map.yaml in spot_behavior_manager_demo](./spot_behavior_manager_demo/config/map.yaml) )
+Please see nodes and edges format section below.
+
+Knowledge representation and execution process of behaviors are separated from actual behavior implementation.
+The iplementation of former is in spot_behavior_manager and spot_behavior_manager_demo, but actual behaviors like walk and elevator are in spot_basic_behaviors.
+behavior_manager_demo node will dynamically load each behaviors defined in map.yaml so you can easilly add your behavior without editing these core implementation.
+Please see spot_basic_behaviors package for behavior examples.
+
+## How to use it
+
+To run demo, please make Spot stand in front of the fiducial in 73B2 and run
+
+```bash
+roslaunch spot_behavior_manager_demo demo.launch
+```
+
+```bash
+$ rostopic pub -1 /spot_behavior_manager_demo/lead_person/goal spot_behavior_manager_msgs/LeadPersonActionGoal "header:
+ seq: 0
+ stamp:
+ secs: 0
+ nsecs: 0
+ frame_id: ''
+goal_id:
+ stamp:
+ secs: 0
+ nsecs: 0
+ id: ''
+goal:
+ target_node_id: 'eng2_2FElevator'"
+```
+
+Then Spot will go to 2FElevator of eng2 by walk behavior and elevator behavior implemented in spot_basic_behaviors packages.
+
+https://user-images.githubusercontent.com/9410362/124338016-aad25380-dbe0-11eb-962f-b9a27e1e08cb.mp4
+
+For more details, please see [spot_behavior_manager](./spot_behavior_manager), [spot_behavior_manager_demo](./spot_behavior_manager_demo) and each behavior documentation. (e.g. [spot_basic_behaviors](./spot_basic_behaviors) )
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/CMakeLists.txt b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/CMakeLists.txt
new file mode 100644
index 0000000000..c18b7735af
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/CMakeLists.txt
@@ -0,0 +1,9 @@
+cmake_minimum_required(VERSION 3.0.2)
+project(spot_basic_behaviors)
+
+find_package(catkin REQUIRED)
+
+catkin_python_setup()
+
+catkin_package(
+)
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/README.md b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/README.md
new file mode 100644
index 0000000000..fa341940b3
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/README.md
@@ -0,0 +1,124 @@
+# spot_basic_behaviors
+
+This package includes exaple implementation of base_behavior for spot_behavior_manager.
+
+## walk behavior
+
+This behavior enables Spot to walk a specified route in a autowalk data from a given waypoint to another waypoint.
+
+behavior name: `spot_basic_behaviors.walk_behavior.WalkBehavior`
+
+https://user-images.githubusercontent.com/9410362/124337233-896f6880-dbdc-11eb-9588-30d4a5193bbd.mp4
+
+### Required Configuration
+
+Before using this behavior, belows are required.
+
+- autowalk data containing a route for the behavior
+- edge and nodes configuration for the behavior
+
+#### Edge
+
+Fields below are required in args of a edge
+
+- `graph`: path to autowalk data
+
+e.g.
+
+```yaml
+- from: 'eng2_73B2'
+ to: 'eng2_73A2'
+ behavior_type: 'spot_basic_behavior.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+```
+
+#### Start and End Node
+
+Fields below are required for nodes
+
+- `waypoints_on_graph`: list of dict. each dict has `graph`, `id`, `localization_method`
+ + `graph`: path to a autowalk data
+ + `id`: waypoint id of the start node in the graph
+ + `localization_method`: localization_method to be used when starting autowalk, this must be 'fiducial' or 'waypoint'
+
+e.g.
+
+```yaml
+ 'eng2_73B2':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'dyed-bat-t00VKo5XixLihCvpsZPRqw=='
+ localization_method: 'fiducial'
+```
+
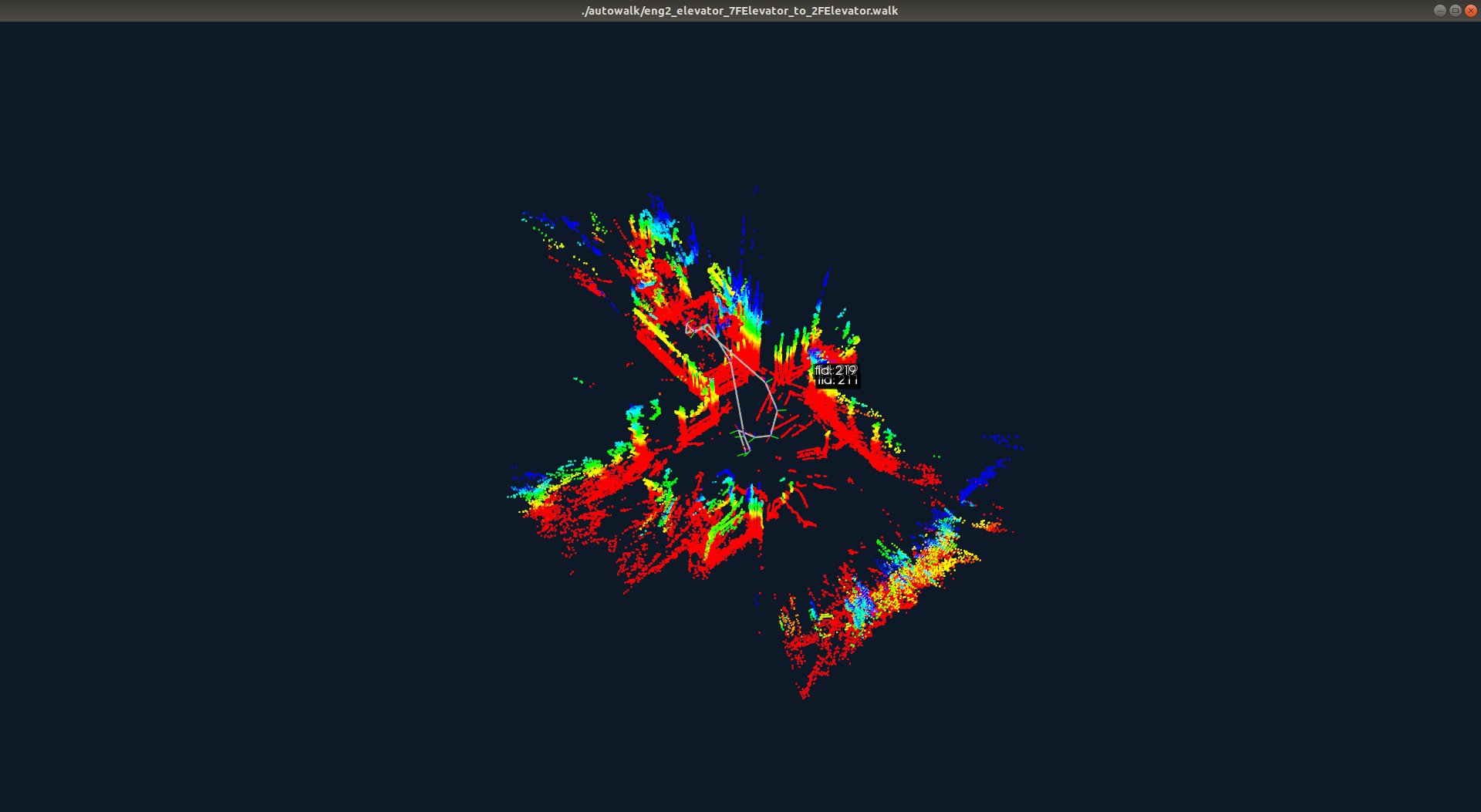
+## elevator behavior
+
+This behavior enables Spot to use an elevator to move to anothor floor.
+
+behavior name: `spot_basic_behaviors.elevator_behavior.ElevatorBehavior`
+
+https://user-images.githubusercontent.com/9410362/124337679-cd636d00-dbde-11eb-8db9-c5fedfda4ad9.mp4
+
+### Required Configuration
+
+Before using this behavior, belows are required.
+
+- autowalk data containing a route for the behavior.
+- apriltag pose information for elevator door frame detection.
+- edge and nodes configuration for the behavior
+
+#### autowalk data
+
+To use this behavior, you need to record autowalk data while Spot riding on the elevator and getting off.
+
+Here is an example.
+
+
+
+#### apriltag pose information
+
+To use this behavior, an Fiducial (april tag) must be placed on the wall near the elevator doors.
+And for elevator door opening and closing detection, transform from elevator foor frame ( center point on the ground ) to the fiducial is required.
+Please see https://github.com/sktometometo/jsk_robot/blob/b166ef04cb954b175bedd5653af808be35e42121/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/tags.yaml#L44-L54 for examples
+
+#### Edge
+
+Fields below are required in args of a edge
+
+- `graph`: path to autowalk data
+- `rest_waypoint_id`: waypoint of rest position in a elevator
+
+e.g.
+
+```yaml
+- from: 'eng2_7FElevator'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_basic_behavior.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'unsaid-collie-jvatvS.7KX9jpzQz61GL4A=='
+```
+
+#### Start and End Node
+
+Fields below are required for nodes
+
+- `waypoints_on_graph`: list of dict. each dict has `graph`, `id`, `localization_method`
+ + `graph`: path to a autowalk data
+ + `id`: waypoint id of the start node in the graph
+ + `localization_method`: localization_method to be used when starting autowalk, this must be 'fiducial' or 'waypoint'
+- `switchbot_device`: switchbot device name for elevator button
+
+e.g.
+
+```yaml
+ 'eng2_7FElevator':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ id: 'sly-chetah-IZ4pVY7vrqO36OoKCYk9Zg=='
+ localization_method: 'fiducial'
+ switchbot_device: '/eng2/7f/elevator/down/button'
+```
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/settings.yaml b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/settings.yaml
new file mode 100644
index 0000000000..a603cfdf5d
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/settings.yaml
@@ -0,0 +1,9 @@
+tag_family: 'tag36h11' # options: tagStandard52h13, tagStandard41h12, tag36h11, tag25h9, tag16h5, tagCustom48h12, tagCircle21h7, tagCircle49h12
+tag_threads: 2 # default: 2
+tag_decimate: 1.0 # default: 1.0
+tag_blur: 0.0 # default: 0.0
+tag_refine_edges: 1 # default: 1
+tag_debug: 0 # default: 0
+max_hamming_dist: 2 # default: 2 (Tunable parameter with 2 being a good choice - values >=3 consume large amounts of memory. Choose the largest value possible.)
+# Other parameters
+publish_tf: true # default: false
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/tags.yaml b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/tags.yaml
new file mode 100644
index 0000000000..f233c51bc3
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/tags.yaml
@@ -0,0 +1,54 @@
+# # Definitions of tags to detect
+#
+# ## General remarks
+#
+# - All length in meters
+# - Ellipsis (...) signifies that the previous element can be repeated multiple times.
+#
+# ## Standalone tag definitions
+# ### Remarks
+#
+# - name is optional
+#
+# ### Syntax
+#
+# standalone_tags:
+# [
+# {id: ID, size: SIZE, name: NAME},
+# ...
+# ]
+standalone_tags:
+ [
+ ]
+# ## Tag bundle definitions
+# ### Remarks
+#
+# - name is optional
+# - x, y, z have default values of 0 thus they are optional
+# - qw has default value of 1 and qx, qy, qz have default values of 0 thus they are optional
+#
+# ### Syntax
+#
+# tag_bundles:
+# [
+# {
+# name: 'CUSTOM_BUNDLE_NAME',
+# layout:
+# [
+# {id: ID, size: SIZE, x: X_POS, y: Y_POS, z: Z_POS, qw: QUAT_W_VAL, qx: QUAT_X_VAL, qy: QUAT_Y_VAL, qz: QUAT_Z_VAL},
+# ...
+# ]
+# },
+# ...
+# ]
+tag_bundles:
+ [
+ {
+ name: 'elevator_door_frame_raw',
+ layout:
+ [
+ {id: 219, size: 0.146, x: -1.7, y: -1.0, z: 0.6, qx: 0.0, qy: 0.7071067811865475, qz: 0.7071067811865476, qw: 0.0, },
+ {id: 211, size: 0.146, x: -1.7, y: -1.0, z: 0.4, qx: 0.0, qy: 0.7071067811865475, qz: 0.7071067811865476, qw: 0.0, },
+ ]
+ }
+ ]
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/switchbot_ros/token.yaml b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/switchbot_ros/token.yaml
new file mode 100644
index 0000000000..bfc61225f6
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/switchbot_ros/token.yaml
@@ -0,0 +1 @@
+token: XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/launch/elevator_detection.launch b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/launch/elevator_detection.launch
new file mode 100644
index 0000000000..4693e60ca2
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/launch/elevator_detection.launch
@@ -0,0 +1,213 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ max_duration: 5.0
+ timeout_duration: 0.05
+ timer_duration: 0.1
+ reference_frame_id: elevator_door_frame_raw
+ output_frame_id: elevator_door_frame
+ fixed_frame_id: odom
+
+
+
+
+
+
+
+ approximate_sync: true
+ output_frame: body
+ input_topics:
+ - $(arg TOPIC_DEPTH_FRONT_RIGHT)/points
+ - $(arg TOPIC_DEPTH_FRONT_LEFT)/points
+ - $(arg TOPIC_DEPTH_RIGHT)/points
+ - $(arg TOPIC_DEPTH_LEFT)/points
+ - $(arg TOPIC_DEPTH_BACK)/points
+
+
+
+
+
+
+
+ initial_pos: [0, 0, 0.5]
+ initial_rot: [0, 0, 0]
+ dimension_x: 0.5
+ dimension_y: 0.5
+ dimension_z: 0.8
+ frame_id: elevator_door_frame
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/package.xml b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/package.xml
new file mode 100644
index 0000000000..a42abf012d
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/package.xml
@@ -0,0 +1,16 @@
+
+
+ spot_basic_behaviors
+ 1.1.0
+ The spot_basic_behaviors package
+
+ Kei Okada
+ Koki Shinjo
+ Koki Shinjo
+ BSD
+
+ catkin
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/setup.py b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/setup.py
new file mode 100644
index 0000000000..754694ff04
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/setup.py
@@ -0,0 +1,9 @@
+from setuptools import setup
+from catkin_pkg.python_setup import generate_distutils_setup
+
+d = generate_distutils_setup(
+ packages=['spot_basic_behaviors'],
+ package_dir={'': 'src'}
+ )
+
+setup(**d)
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/__init__.py b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/__init__.py
new file mode 100644
index 0000000000..077d19e4ad
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/__init__.py
@@ -0,0 +1,2 @@
+import spot_basic_behaviors.walk_behavior as walk_behavior
+import spot_basic_behaviors.elevator_behavior as elevator_behavior
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/elevator_behavior.py b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/elevator_behavior.py
new file mode 100644
index 0000000000..3922e5df9f
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/elevator_behavior.py
@@ -0,0 +1,189 @@
+# -*- coding: utf-8 -*-
+
+from spot_behavior_manager.base_behavior import BaseBehavior
+
+import actionlib
+import roslaunch
+import rospkg
+import rospy
+
+from switchbot_ros.msg import SwitchBotCommandGoal, SwitchBotCommandAction
+from sensor_msgs.msg import PointCloud2
+
+class ElevatorBehavior(BaseBehavior):
+
+ def door_point_cloud_callback(self, msg):
+ if len(msg.data) == 0:
+ self.door_is_open = True
+ else:
+ self.door_is_open = False
+
+ def run_initial(self, start_node, end_node, edge, pre_edge ):
+
+ rospy.logdebug('run_initial() called')
+
+ # launch recognition launch
+ uuid = roslaunch.rlutil.get_or_generate_uuid(None, False)
+ roslaunch_path = rospkg.RosPack().get_path('spot_basic_behaviors') +\
+ '/launch/elevator_detection.launch'
+ roslaunch_cli_args = [roslaunch_path]
+ roslaunch_file = roslaunch.rlutil.resolve_launch_arguments(roslaunch_cli_args)
+ self.roslaunch_parent = roslaunch.parent.ROSLaunchParent(
+ uuid,
+ roslaunch_file
+ )
+ self.roslaunch_parent.start()
+
+ # value for door openring checker
+ self.door_is_open = False
+ self.subscriber_door_check = None
+
+ # value for switchbot
+ self.action_client_switchbot = actionlib.SimpleActionClient(
+ '/switchbot_ros/switch',
+ SwitchBotCommandAction
+ )
+
+ def run_main(self, start_node, end_node, edge, pre_edge ):
+
+ rospy.logdebug('run_main() called')
+
+ graph_name = edge.properties['graph']
+ start_id = filter(
+ lambda x: x['graph'] == graph_name,
+ start_node.properties['waypoints_on_graph']
+ )[0]['id']
+ end_id = filter(
+ lambda x: x['graph'] == graph_name,
+ end_node.properties['waypoints_on_graph']
+ )[0]['id']
+ rest_waypoint_id = edge.properties['rest_waypoint_id']
+ localization_method = filter(
+ lambda x: x['graph'] == graph_name,
+ start_node.properties['waypoints_on_graph']
+ )[0]['localization_method']
+
+ # graph uploading and localization
+ if pre_edge is not None and \
+ graph_name == pre_edge.properties['graph']:
+ rospy.loginfo('graph upload and localization skipped.')
+ else:
+ # Upload
+ ret = self.spot_client.upload_graph(graph_name)
+ if ret[0]:
+ rospy.loginfo('graph {} uploaded.'.format(graph_name))
+ else:
+ rospy.logerr('graph uploading failed: {}'.format(ret[1]))
+ return False
+ # Localization
+ if localization_method == 'fiducial':
+ ret = self.spot_client.set_localization_fiducial()
+ elif localization_method == 'waypoint':
+ ret = self.spot_client.set_localization_waypoint(start_id)
+ else:
+ ret = (False,'Unknown localization method')
+ if ret[0]:
+ rospy.loginfo('robot is localized on the graph.')
+ else:
+ rospy.logwarn('Localization failed: {}'.format(ret[1]))
+ return False
+
+ # start door opening check from outside
+ self.subscriber_door_check = rospy.Subscriber(
+ '/spot_recognition/elevator_door_points',
+ PointCloud2,
+ self.door_point_cloud_callback)
+
+ # push button with switchbot
+ rospy.loginfo('calling elevator when riding...')
+ if not self.action_client_switchbot.wait_for_server(rospy.Duration(10)):
+ rospy.logerr('switchbot server seems to fail.')
+ return False
+ else:
+ switchbot_goal = SwitchBotCommandGoal()
+ switchbot_goal.device_name = start_node.properties['switchbot_device']
+ switchbot_goal.command = 'press'
+ self.action_client_switchbot.send_goal(switchbot_goal)
+ self.action_client_switchbot.wait_for_result()
+ result = self.action_client_switchbot.get_result()
+ rospy.loginfo('switchbot result: {}'.format(result))
+ if not result.done:
+ rospy.logerr('switchbot calling failed.')
+ return False
+ rospy.loginfo('elevator calling when riding on has succeeded')
+
+ # wait for elevator
+ rate = rospy.Rate(2)
+ while not rospy.is_shutdown():
+ rate.sleep()
+ if self.door_is_open:
+ break
+ rospy.loginfo('elevator door opened.')
+ self.subscriber_door_check.unregister()
+ self.subscriber_door_check = None
+
+ # start navigation to rest point
+ rate = rospy.Rate(10)
+ self.spot_client.navigate_to( rest_waypoint_id, blocking=True)
+ result = self.spot_client.get_navigate_to_result()
+ ## recovery when riding on
+ if not result.success:
+ rospy.logwarn('Navigation failed when riding on')
+ self.spot_client.navigate_to( start_id, blocking=True)
+ self.spot_client.wait_for_navigate_to_result()
+ return result.success
+
+ # call elevator from destination floor
+ rospy.loginfo('calling elevator when getting off...')
+ if not self.action_client_switchbot.wait_for_server(rospy.Duration(10)):
+ rospy.logerr('switchbot server seems to fail.')
+ return False
+ else:
+ switchbot_goal = SwitchBotCommandGoal()
+ switchbot_goal.device_name = end_node.properties['switchbot_device']
+ switchbot_goal.command = 'press'
+ self.action_client_switchbot.send_goal(switchbot_goal)
+ self.action_client_switchbot.wait_for_result()
+ result = self.action_client_switchbot.get_result()
+ rospy.loginfo('switchbot result: {}'.format(result))
+ if not result.done:
+ rospy.logerr('switchbot calling failed.')
+ return False
+ rospy.loginfo('elevator calling when getting off has succeeded')
+
+ # start door openning check from inside
+ self.subscriber_door_check = rospy.Subscriber(
+ '/spot_recognition/elevator_door_points',
+ PointCloud2,
+ self.door_point_cloud_callback)
+
+ # check if the door is closed
+ rate = rospy.Rate(2)
+ while not rospy.is_shutdown():
+ rate.sleep()
+ if not self.door_is_open:
+ break
+ rospy.loginfo('elevator door closed')
+
+ # check if the door is open
+ rate = rospy.Rate(2)
+ while not rospy.is_shutdown():
+ rate.sleep()
+ if self.door_is_open:
+ break
+ rospy.loginfo('elevator door opened')
+
+ # get off the elevator
+ self.spot_client.navigate_to(end_id, blocking=True)
+ result = self.spot_client.get_navigate_to_result()
+
+ return result.success
+
+ def run_final(self, start_node, end_node, edge, pre_edge ):
+
+ rospy.logdebug('run_finalize() called')
+
+ if self.subscriber_door_check != None:
+ self.subscriber_door_check.unregister()
+ self.subscriber_door_check = None
+ self.roslaunch_parent.shutdown()
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/walk_behavior.py b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/walk_behavior.py
new file mode 100644
index 0000000000..e9efc34f97
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/walk_behavior.py
@@ -0,0 +1,79 @@
+# -*- coding: utf-8 -*-
+
+from spot_behavior_manager.base_behavior import BaseBehavior
+
+import rospy
+
+class WalkBehavior(BaseBehavior):
+
+ def run_initial(self, start_node, end_node, edge, pre_edge ):
+
+ rospy.logdebug('run_initial() called')
+
+ def run_main(self, start_node, end_node, edge, pre_edge ):
+
+ rospy.logdebug('run_main() called')
+
+ graph_name = edge.properties['graph']
+ start_id = filter(
+ lambda x: x['graph'] == graph_name,
+ start_node.properties['waypoints_on_graph']
+ )[0]['id']
+ end_id = filter(
+ lambda x: x['graph'] == graph_name,
+ end_node.properties['waypoints_on_graph']
+ )[0]['id']
+ localization_method = filter(
+ lambda x: x['graph'] == graph_name,
+ start_node.properties['waypoints_on_graph']
+ )[0]['localization_method']
+
+ # graph uploading and localization
+ if pre_edge is not None and \
+ graph_name == pre_edge.properties['graph']:
+ rospy.loginfo('graph upload and localization skipped.')
+ else:
+ # Upload
+ ret = self.spot_client.upload_graph(graph_name)
+ if ret[0]:
+ rospy.loginfo('graph {} uploaded.'.format(graph_name))
+ else:
+ rospy.logerr('graph uploading failed: {}'.format(ret[1]))
+ return False
+ # Localization
+ if localization_method == 'fiducial':
+ ret = self.spot_client.set_localization_fiducial()
+ elif localization_method == 'waypoint':
+ ret = self.spot_client.set_localization_waypoint(start_id)
+ else:
+ ret = (False,'Unknown localization method')
+ if ret[0]:
+ rospy.loginfo('robot is localized on the graph.')
+ else:
+ rospy.logwarn('Localization failed: {}'.format(ret[1]))
+ return False
+
+ # start navigation
+ success = False
+ rate = rospy.Rate(10)
+ self.sound_client.say('移動します',blocking=True)
+ self.spot_client.navigate_to( end_id, blocking=False)
+ while not rospy.is_shutdown():
+ rate.sleep()
+ if self.spot_client.wait_for_navigate_to_result(rospy.Duration(0.1)):
+ result = self.spot_client.get_navigate_to_result()
+ success = result.success
+ rospy.loginfo('result: {}'.format(result))
+ break
+
+ # recovery on failure
+ if not success:
+ self.sound_client.say('失敗したので元に戻ります', blocking=True)
+ self.spot_client.navigate_to( start_id, blocking=True)
+ self.spot_client.wait_for_navigate_to_result()
+
+ return success
+
+ def run_final(self, start_node, end_node, edge, pre_edge ):
+
+ rospy.logdebug('run_finalize() called')
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/CMakeLists.txt b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/CMakeLists.txt
new file mode 100644
index 0000000000..2e3c06f211
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/CMakeLists.txt
@@ -0,0 +1,9 @@
+cmake_minimum_required(VERSION 3.0.2)
+project(spot_behavior_manager)
+
+find_package(catkin REQUIRED)
+
+catkin_python_setup()
+
+catkin_package(
+)
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/package.xml b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/package.xml
new file mode 100644
index 0000000000..d37580ccb5
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/package.xml
@@ -0,0 +1,39 @@
+
+
+ spot_behavior_manager
+ 1.1.0
+ The spot_behavior_manager package
+
+ Kei Okada
+ Koki Shinjo
+ Koki Shinjo
+
+ BSD
+
+ catkin
+
+ rospy
+
+ actionlib
+ networkx
+ rospkg
+ rospy
+ roslaunch
+ sound_play
+ spot_behavior_manager_msgs
+ spot_ros_client
+ std_msgs
+
+ actionlib
+ networkx
+ rospkg
+ rospy
+ roslaunch
+ sound_play
+ spot_behavior_manager_msgs
+ spot_ros_client
+ std_msgs
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/setup.py b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/setup.py
new file mode 100644
index 0000000000..c3eab0d109
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/setup.py
@@ -0,0 +1,9 @@
+from setuptools import setup
+from catkin_pkg.python_setup import generate_distutils_setup
+
+d = generate_distutils_setup(
+ packages=['spot_behavior_manager'],
+ package_dir={'': 'src'}
+ )
+
+setup(**d)
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/src/spot_behavior_manager/__init__.py b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/src/spot_behavior_manager/__init__.py
new file mode 100644
index 0000000000..defc635b8b
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/src/spot_behavior_manager/__init__.py
@@ -0,0 +1,2 @@
+import spot_behavior_manager.support_behavior_graph as support_behavior_graph
+import spot_behavior_manager.base_behavior as base_behavior
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/src/spot_behavior_manager/base_behavior.py b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/src/spot_behavior_manager/base_behavior.py
new file mode 100644
index 0000000000..925e2e8384
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/src/spot_behavior_manager/base_behavior.py
@@ -0,0 +1,47 @@
+import rospy
+import roslaunch
+
+
+def load_behavior_class(class_string):
+ package_name = class_string.split('.')[0]
+ module_name = class_string.split('.')[1]
+ class_name = class_string.split('.')[2]
+ behavior_class = getattr(getattr(__import__(package_name),module_name),class_name)
+ return behavior_class
+
+
+class BaseBehavior(object):
+
+ def __init__(self, spot_client, sound_client):
+
+ self.spot_client = spot_client
+ self.sound_client = sound_client
+
+ def run_initial(self, start_node, end_node, edge, pre_edge ):
+ pass
+
+ def run_main(self, start_node, end_node, edge, pre_edge ):
+ pass
+
+ def run_final(self, start_node, end_node, edge, pre_edge ):
+ pass
+
+
+class SimpleBehavior(BaseBehavior):
+
+ def run_initial(self, start_node, end_node, edge, pre_edge ):
+
+ rospy.loginfo('__run_initial() called')
+
+ def run_main(self, start_node, end_node, edge, pre_edge ):
+
+ rospy.loginfo('__run_main() called')
+ rospy.loginfo('start_node: {}'.format(start_node))
+ rospy.loginfo('end_node: {}'.format(end_node))
+ rospy.loginfo('edge: {}'.format(edge))
+ rospy.loginfo('pre_edge: {}'.format(pre_edge))
+ return True
+
+ def run_final(self, start_node, end_node, edge, pre_edge ):
+
+ rospy.loginfo('__run_finalize() called')
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/src/spot_behavior_manager/behavior_manager_node.py b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/src/spot_behavior_manager/behavior_manager_node.py
new file mode 100644
index 0000000000..10f71292b7
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/src/spot_behavior_manager/behavior_manager_node.py
@@ -0,0 +1,155 @@
+# -*- coding: utf-8 -*-
+
+import actionlib
+import rospy
+import roslaunch
+
+from sound_play.libsoundplay import SoundClient
+from spot_ros_client.libspotros import SpotRosClient
+
+from spot_behavior_manager.support_behavior_graph import SupportBehaviorGraph
+from spot_behavior_manager.base_behavior import BaseBehavior, load_behavior_class
+
+from std_msgs.msg import String
+from spot_behavior_manager_msgs.msg import LeadPersonAction, LeadPersonFeedback, LeadPersonResult
+from spot_behavior_manager_msgs.srv import ResetCurrentNode, ResetCurrentNodeResponse
+
+
+class BehaviorManagerNode(object):
+
+ def __init__(self):
+
+ # navigation dictonary
+ raw_edges = rospy.get_param('~map/edges')
+ raw_nodes = rospy.get_param('~map/nodes')
+ self.graph = SupportBehaviorGraph(raw_edges,raw_nodes)
+ self.current_node_id = rospy.get_param('~initial_node_id')
+ self.pre_edge = None
+
+ # action clients
+ self.spot_client = SpotRosClient();
+ self.sound_client = SoundClient(
+ blocking=False,
+ sound_action='/robotsound_jp',
+ sound_topic='/robotsound_jp'
+ )
+
+ # publisher
+ self.pub_current_node_id = rospy.Publisher('~current_node_id',String,queue_size=1)
+
+ # reset service
+ self.service_reset_current_node_id = rospy.Service(
+ '~reset_current_node_id',
+ ResetCurrentNode,
+ self.handler_reset_current_node_id
+ )
+
+ #
+ roslaunch.pmon._init_signal_handlers()
+
+ # action server
+ self.server_lead_person = actionlib.SimpleActionServer(
+ '~lead_person',
+ LeadPersonAction,
+ execute_cb=self.handler_lead_person,
+ auto_start=False
+ )
+ self.server_lead_person.start()
+
+ rospy.loginfo('Initialized!')
+
+
+ def run(self):
+
+ rate = rospy.Rate(1)
+ while not rospy.is_shutdown():
+ rate.sleep()
+ self.pub_current_node_id.publish(String(data=self.current_node_id))
+
+
+ def handler_reset_current_node_id(self, req):
+
+ rospy.loginfo('current_node_id is reset to {}'.format(req.current_node_id))
+ self.current_node_id = req.current_node_id
+ self.pre_edge = None
+ return ResetCurrentNodeResponse(success=True)
+
+
+ def handler_lead_person(self, goal):
+
+ rospy.loginfo('Lead Action started. goal: {}'.format(goal))
+
+ # path calculation
+ path = self.graph.calcPath( self.current_node_id, goal.target_node_id )
+ if path is None:
+ rospy.logerr('No path from {} to {}'.format(self.current_node_id,goal.target_node_id))
+ self.sound_client.say('パスが見つかりませんでした')
+ result = LeadPersonResult(success=False)
+ self.server_lead_person.set_aborted(result)
+ return
+
+ # navigation of edges in the path
+ self.sound_client.say('目的地に向かいます',blocking=True)
+ for edge in path:
+ rospy.loginfo('Navigating Edge {}...'.format(edge))
+ try:
+ if self.navigate_edge(edge):
+ rospy.loginfo('Edge {} succeeded.'.format(edge))
+ self.current_node_id = edge.node_id_to
+ self.pre_edge = edge
+ else:
+ rospy.logerr('Edge {} failed'.format(edge))
+ self.sound_client.say('目的地に到達できませんでした',blocking=True)
+ result = LeadPersonResult(success=False)
+ self.server_lead_person.set_aborted(result)
+ return
+ except Exception as e:
+ rospy.logerr('Got an error while navigating edge {}: {}'.format(edge, e))
+ self.sound_client.say('エラーが発生しました',blocking=True)
+ result = LeadPersonResult(success=False)
+ self.server_lead_person.set_aborted(result)
+ return
+
+ self.sound_client.say('目的地に到着しました.',blocking=True)
+
+ result = LeadPersonResult(success=True)
+ self.server_lead_person.set_succeeded(result)
+ return
+
+
+ def navigate_edge(self, edge):
+
+ # start node id validation
+ if self.current_node_id != edge.node_id_from:
+ rospy.logwarn(
+ 'current_node_id {} does not match node_id_from of edge ({})'.format(
+ self.current_node_id,
+ edge.node_id_from)
+ )
+ return False
+
+ # load behavior class
+ try:
+ behavior_class = load_behavior_class(edge.behavior_type)
+ behavior = behavior_class(
+ self.spot_client,
+ self.sound_client
+ )
+ except Exception as e:
+ rospy.logerr('Failed to load and initialize behavior class: {}'.format(e))
+ self.sound_client.say('行動クラスを読み込めませんでした',blocking=True)
+ return False
+
+ node_from = self.graph.nodes[edge.node_id_from]
+ node_to = self.graph.nodes[edge.node_id_to]
+
+ try:
+ behavior.run_initial( node_from, node_to, edge, self.pre_edge )
+ success = behavior.run_main( node_from, node_to, edge, self.pre_edge )
+ behavior.run_final( node_from, node_to, edge, self.pre_edge )
+ except Exception as e:
+ rospy.logerr('Got error while running a behavior: {}'.format(e))
+ self.sound_client.say('行動中にエラーが発生しました',blocking=True)
+ return False
+
+ return success
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/src/spot_behavior_manager/support_behavior_graph.py b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/src/spot_behavior_manager/support_behavior_graph.py
new file mode 100644
index 0000000000..d991c78a60
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager/src/spot_behavior_manager/support_behavior_graph.py
@@ -0,0 +1,64 @@
+import networkx as nx
+
+class GraphEdge:
+
+ def __init__(self,
+ node_id_from,
+ node_id_to,
+ behavior_type,
+ cost,
+ properties
+ ):
+ self.node_id_from = node_id_from
+ self.node_id_to = node_id_to
+ self.behavior_type = behavior_type
+ self.cost = cost
+ self.properties = properties
+
+class GraphNode:
+
+ def __init__(self,
+ node_id,
+ properties
+ ):
+ self.node_id = node_id
+ self.properties = properties
+
+class SupportBehaviorGraph:
+
+ def __init__(self, raw_edges=[], raw_nodes={}):
+
+ self.edges = {}
+ self.nodes = {}
+ self.network = nx.DiGraph()
+
+ edges = []
+ for raw_edge in raw_edges:
+ edges.append( GraphEdge( raw_edge['from'],
+ raw_edge['to'],
+ raw_edge['behavior_type'],
+ int(raw_edge['cost']),
+ raw_edge['args'] ))
+ nodes = {}
+ for key, raw_node in raw_nodes.items():
+ nodes[key] = GraphNode( key, raw_node )
+
+ for key, node in nodes.items():
+ self.nodes[key] = node
+ for edge in edges:
+ self.edges[edge.node_id_from,edge.node_id_to] = edge
+ self.network.add_edge(
+ edge.node_id_from,
+ edge.node_id_to,
+ weight=edge.cost)
+
+ def calcPath(self, node_id_from, node_id_to):
+
+ try:
+ node_id_list = nx.shortest_path( self.network, node_id_from, node_id_to )
+ except nx.NetworkXNoPath as e:
+ return None
+ path = []
+ for index in range(len(node_id_list)-1):
+ path.append(self.edges[node_id_list[index],node_id_list[index+1]])
+ return path
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/CMakeLists.txt b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/CMakeLists.txt
new file mode 100644
index 0000000000..c410beb1e5
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/CMakeLists.txt
@@ -0,0 +1,7 @@
+cmake_minimum_required(VERSION 3.0.2)
+project(spot_behavior_manager_demo)
+
+find_package(catkin REQUIRED)
+
+catkin_package(
+)
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/README.md b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/README.md
new file mode 100644
index 0000000000..22d855792f
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/README.md
@@ -0,0 +1 @@
+# spot_behavior_manager_demo
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/config/map.yaml b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/config/map.yaml
new file mode 100644
index 0000000000..17132c5167
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/config/map.yaml
@@ -0,0 +1,147 @@
+edges:
+ - from: 'eng2_73B2'
+ to: 'dummy'
+ behavior_type: 'spot_behavior_manager.base_behavior.SimpleBehavior'
+ cost: 10
+ args: {}
+ - from: 'dummy'
+ to: 'eng2_73B2'
+ behavior_type: 'spot_behavior_manager.base_behavior.SimpleBehavior'
+ cost: 10
+ args: {}
+ - from: 'eng2_73B2'
+ to: 'eng2_73A2'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_73A2'
+ to: 'eng2_73B2'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_73B2'
+ to: 'eng2_7FElevator'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_7FElevator'
+ to: 'eng2_73B2'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_7FElevator'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_basic_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'unsaid-collie-jvatvS.7KX9jpzQz61GL4A=='
+ - from: 'eng2_2FElevator'
+ to: 'eng2_7FElevator'
+ behavior_type: 'spot_basic_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'unsaid-collie-jvatvS.7KX9jpzQz61GL4A=='
+ - from: 'eng2_2FElevator'
+ to: 'eng_TelephoneBox'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ - from: 'eng_TelephoneBox'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ - from: 'eng8_Piloti_Center'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ - from: 'eng8_Piloti_Center'
+ to: 'eng_TelephoneBox'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+nodes:
+ 'dummy':
+ name_en: 'dummy'
+ name_jp: 'ダミー'
+ 'eng2_73B2':
+ name_en: '73B2'
+ name_jp: '7 3 B 2'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'dyed-bat-t00VKo5XixLihCvpsZPRqw=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_81C1.walk'
+ id: 'fuzzed-medusa-wyXWCEjmWas1kMo8EJW8Bw=='
+ localization_method: 'fiducial'
+ 'eng2_73A2':
+ name_en: '73A2'
+ name_jp: '7 3 A 2'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'affine-drake-Jfb0ZPtNcqcrq9yhnEl2DA=='
+ localization_method: 'fiducial'
+ 'eng2_7FElevator':
+ name_en: 'Elevator'
+ name_jp: 'エレベーター'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'looted-cougar-RWT2C0zLJXG.ezYnCuLUeQ=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_7FElevator_to_2FElevator.walk'
+ id: 'larger-mudcat-0x3bt3Dif.1QU9JfXpyQPw=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ id: 'sly-chetah-IZ4pVY7vrqO36OoKCYk9Zg=='
+ localization_method: 'fiducial'
+ switchbot_device: '/eng2/7f/elevator/down/button'
+ floor: 7
+ 'eng2_2FElevator':
+ name_en: 'Elevator'
+ name_jp: 'エレベーター'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_7FElevator_to_2FElevator.walk'
+ id: 'rainy-collie-uwFW2KVYg2YCUi8FF6N00g=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_2FEntrance.walk'
+ id: 'snaky-beagle-.fmRm2JflzlV6Dv5fTdnIQ=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_MainGate.walk'
+ id: 'banner-oxen-UrEwTUbZYL0IQnY5TCFwrA=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ id: 'shelfy-dassie-vK9Tf3cAQpdA.25gPJl8OQ=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ id: 'inland-remora-FqtX8ScP+.inEd4xFYKq4A=='
+ localization_method: 'fiducial'
+ switchbot_device: '/eng2/2f/elevator/up/button'
+ floor: 2
+ 'eng_TelephoneBox':
+ name_en: 'telephone box'
+ name_jp: '電話ボックス'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ id: 'slain-pika-VdtPz3lWcp5T+pEArUB3PA=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng_TelephoneBox_to_HongoMainGate.walk'
+ id: 'aired-hyrax-BF+hXHaUufi.DLd3pEWm5Q=='
+ localization_method: 'fiducial'
+ 'eng8_Piloti_Center':
+ name_en: 'Piloti'
+ name_jp: 'ピロティ'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ id: 'azoic-lion-Iapbto7rzlzuFF0MvXdyPA=='
+ localization_method: 'fiducial'
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/launch/demo.launch b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/launch/demo.launch
new file mode 100644
index 0000000000..b236a5a6d6
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/launch/demo.launch
@@ -0,0 +1,19 @@
+
+
+
+
+
+
+ initial_node_id: 'eng2_73B2'
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/node_scripts/demo.py b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/node_scripts/demo.py
new file mode 100755
index 0000000000..cb1a90adc1
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/node_scripts/demo.py
@@ -0,0 +1,14 @@
+#!/usr/bin/env python
+# -*- coding: utf-8 -*-
+
+import rospy
+from spot_behavior_manager.behavior_manager_node import BehaviorManagerNode
+
+def main():
+
+ rospy.init_node('behavior_manager_node')
+ node = BehaviorManagerNode()
+ node.run()
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/package.xml b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/package.xml
new file mode 100644
index 0000000000..c72c286a4d
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_demo/package.xml
@@ -0,0 +1,22 @@
+
+
+ spot_behavior_manager_demo
+ 1.1.0
+ The spot_behavior_manager_demo package
+
+ Kei Okada
+ Koki Shinjo
+ Koki Shinjo
+
+ BSD
+
+ catkin
+
+ rospy
+ spot_behavior_manager
+ spot_basic_behavior
+ spot_autowalk_data
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_msgs/CMakeLists.txt b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_msgs/CMakeLists.txt
new file mode 100644
index 0000000000..e106338e3d
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_msgs/CMakeLists.txt
@@ -0,0 +1,22 @@
+cmake_minimum_required(VERSION 3.0.2)
+project(spot_behavior_manager_msgs)
+
+find_package(catkin REQUIRED COMPONENTS genmsg actionlib actionlib_msgs)
+
+
+add_action_files(
+ DIRECTORY action
+ FILES LeadPerson.action
+)
+
+add_service_files(
+ DIRECTORY srv
+ FILES ResetCurrentNode.srv
+)
+
+generate_messages(DEPENDENCIES actionlib_msgs)
+
+catkin_package(
+ LIBRARIES spot_behavior_manager_msgs
+ CATKIN_DEPENDS message_runtime
+)
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_msgs/action/LeadPerson.action b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_msgs/action/LeadPerson.action
new file mode 100644
index 0000000000..e660e68f01
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_msgs/action/LeadPerson.action
@@ -0,0 +1,5 @@
+string target_node_id
+---
+bool success
+---
+string current_node_id
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_msgs/package.xml b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_msgs/package.xml
new file mode 100644
index 0000000000..98f45f148c
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_msgs/package.xml
@@ -0,0 +1,25 @@
+
+
+ spot_behavior_manager_msgs
+ 1.1.0
+ The spot_behavior_manager_msgs package
+
+ Kei Okada
+ Koki Shinjo
+ Koki Shinjo
+
+ BSD
+
+ catkin
+
+ actionlib
+ actionlib_msgs
+ message_generation
+
+ actionlib
+ actionlib_msgs
+ message_runtime
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_msgs/srv/ResetCurrentNode.srv b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_msgs/srv/ResetCurrentNode.srv
new file mode 100644
index 0000000000..8fa01bd4c0
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_behavior_manager_msgs/srv/ResetCurrentNode.srv
@@ -0,0 +1,3 @@
+string current_node_id
+---
+bool success
diff --git a/jsk_spot_robot/jsk_spot_startup/package.xml b/jsk_spot_robot/jsk_spot_startup/package.xml
index b3158f67c5..92af38e587 100644
--- a/jsk_spot_robot/jsk_spot_startup/package.xml
+++ b/jsk_spot_robot/jsk_spot_startup/package.xml
@@ -5,7 +5,9 @@
The jsk_spot_startup package
Kei Okada
+ Koki Shinjo
Koki Shinjo
+
BSD
catkin
diff --git a/jsk_spot_robot/spot_autowalk_data/CMakeLists.txt b/jsk_spot_robot/spot_autowalk_data/CMakeLists.txt
new file mode 100644
index 0000000000..c150c49a71
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/CMakeLists.txt
@@ -0,0 +1,9 @@
+cmake_minimum_required(VERSION 3.0.2)
+project(spot_autowalk_data)
+
+find_package(catkin REQUIRED)
+
+add_custom_target(${PROJECT_NAME}_download_autowalk_data ALL COMMAND python$ENV{ROS_PYTHON_VERSION} ${PROJECT_SOURCE_DIR}/scripts/download_autowalk_data.py)
+
+catkin_package(
+)
diff --git a/jsk_spot_robot/spot_autowalk_data/README.md b/jsk_spot_robot/spot_autowalk_data/README.md
new file mode 100644
index 0000000000..7e66b1d2d6
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/README.md
@@ -0,0 +1,62 @@
+# spot_autowalk_data
+
+This package includes autowalk data downloaded from public Googledrive folder with jsk_data.
+
+## scripts
+
+### download_autowalk_data.py
+
+this scripts download autowalk data from google drive. this script will be run when catkin build.
+
+### view_map.py
+
+this script visualize autowalk data and each waypoint id
+
+## autowalk data in this packages
+
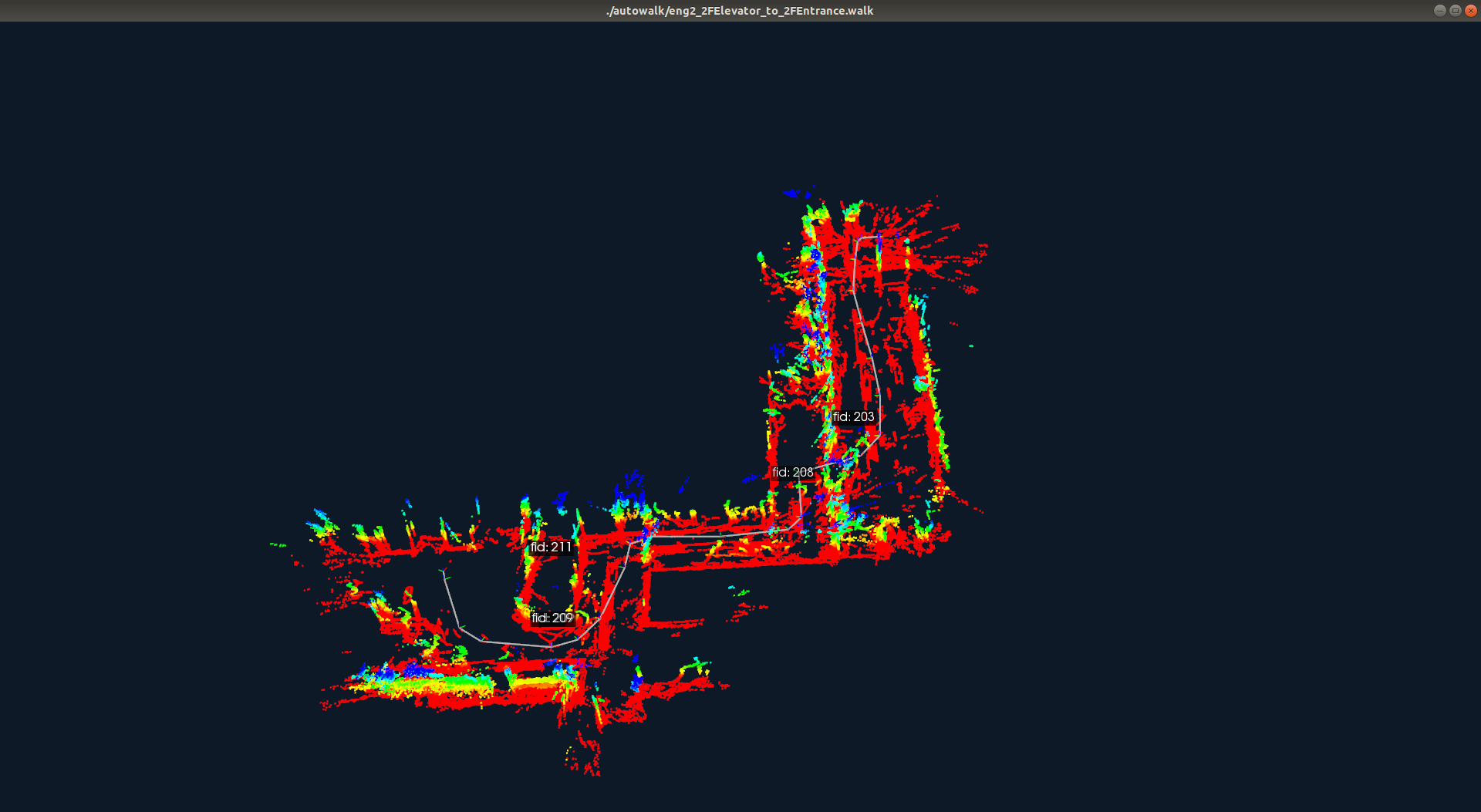
+### eng2_2FElevator_to_2FEntrance.walk
+
+
+
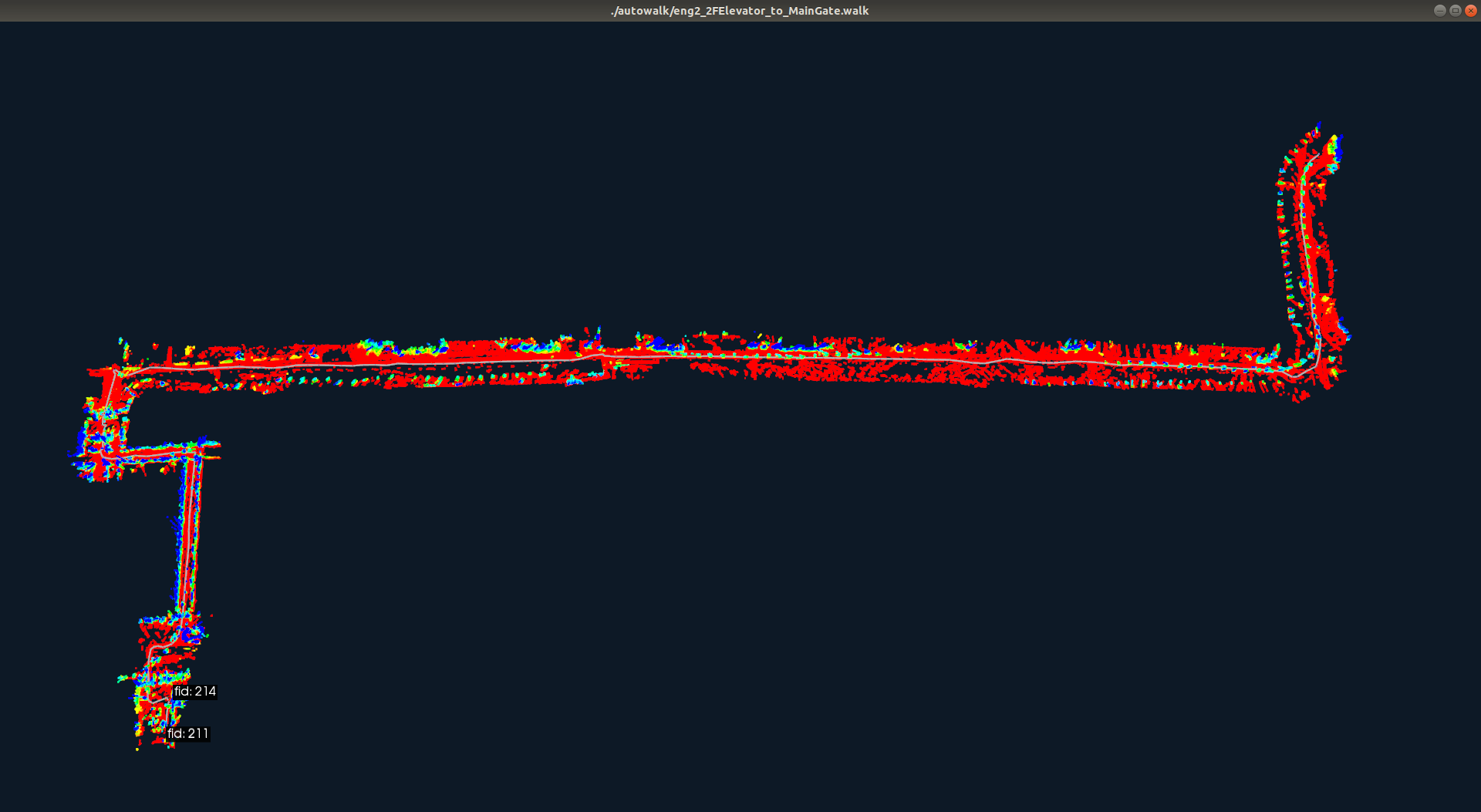
+### eng2_2FElevator_to_MainGate
+
+
+
+### eng2_2Felevator_to_eng8_2FElevator
+
+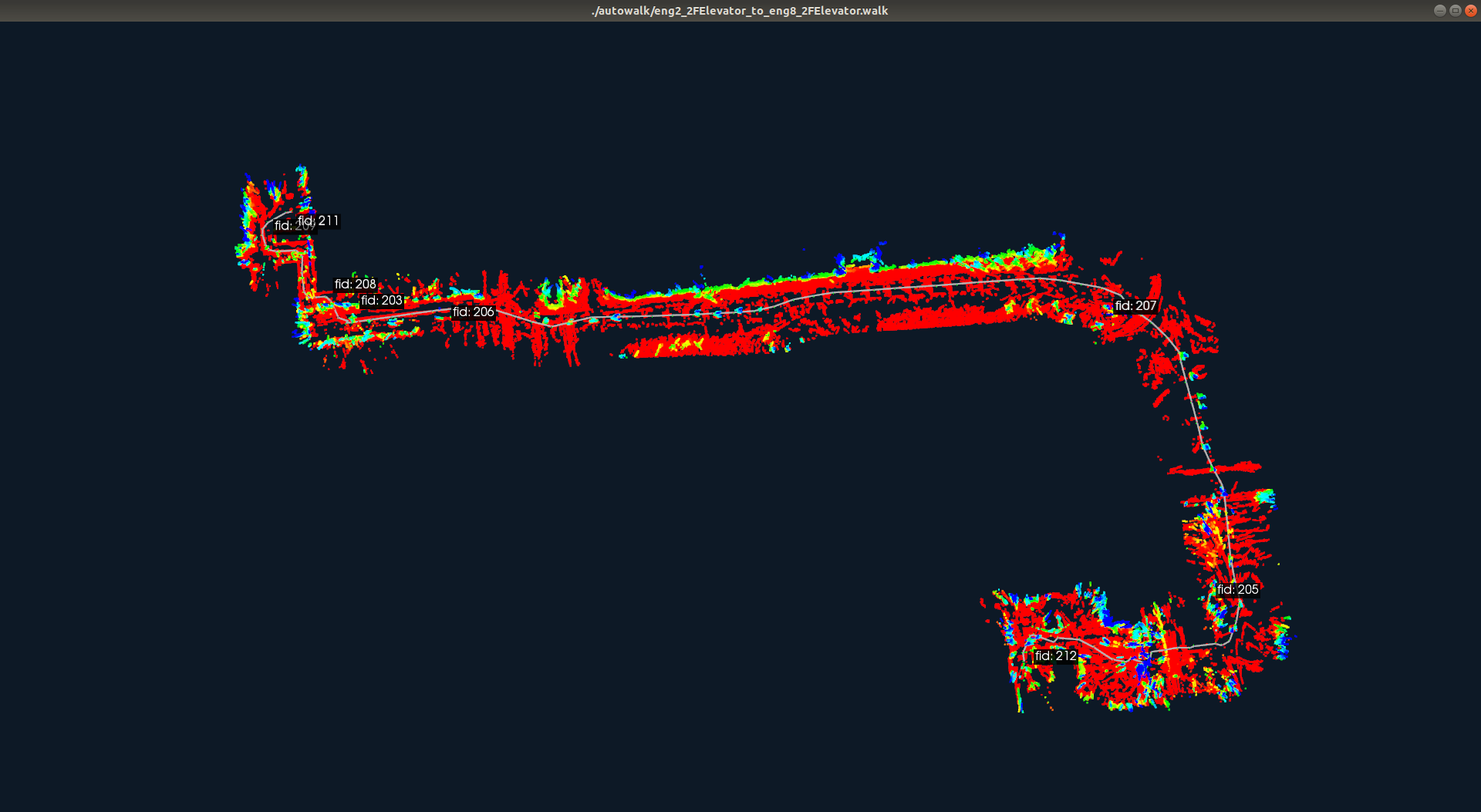
+
+### eng2_7FElevator_to_2FElevator
+
+
+
+### eng2_73B2_to_81C1
+
+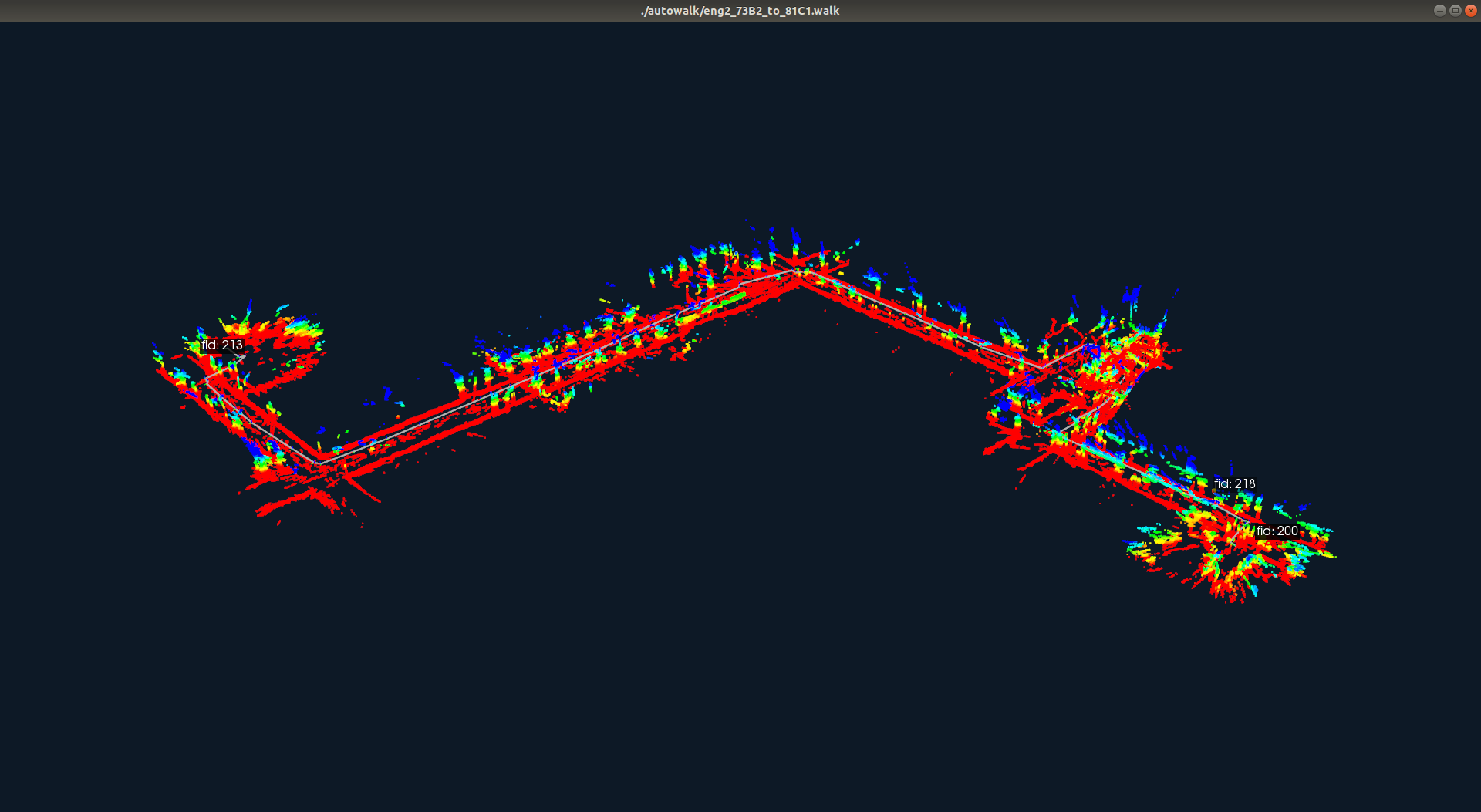
+
+### eng2_elevator_7FElevator_to_2FElevator
+
+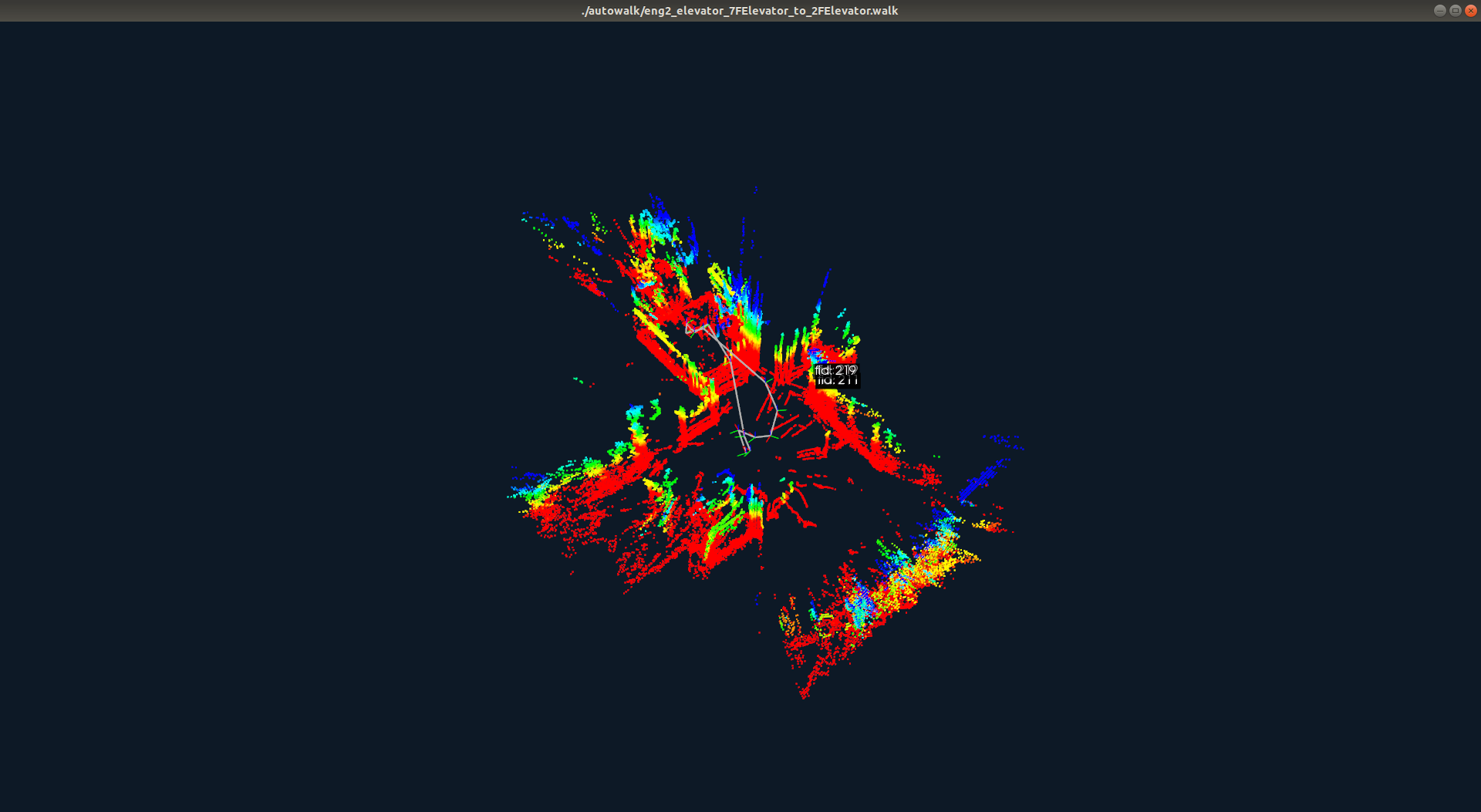
+
+### eng_TelephoneBox_to_HongoMainGate
+
+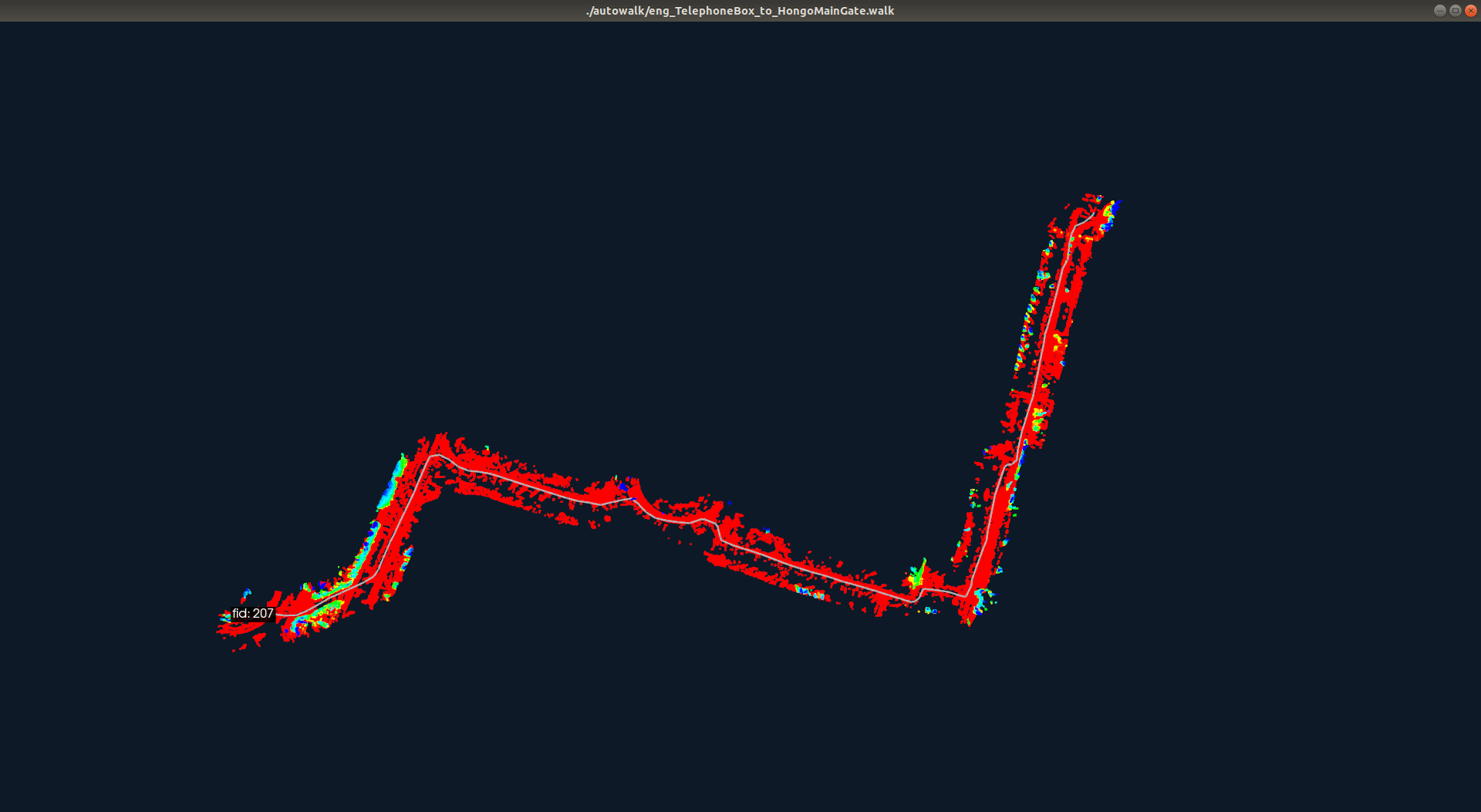
+
+## How to add autowalk data in this package
+
+1. record a new autowalk data
+2. archive and compress an autowalk data directory (e.g. `autowalk.walk`) to `autowalk.walk.tar.gz` by `tar -zcvf autowalk.walk.tar.gz autowalk.walk`
+3. upload `autowalk.walk.tar.gz` to [jsk_data public google drive folger](https://drive.google.com/drive/u/0/folders/0B9P1L--7Wd2vUGplQkVLTFBWcFE?resourcekey=0-qlPyB_oRQm887pgRGiPhgg)
+4. add new entry to download_autowalk_data.py like
+
+```
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/autowalk.walk.tar.gz',
+ url='https://drive.google.com/uc?id=',
+ md5='',
+ extract=True
+ )
+```
+
+5. update README.md
diff --git a/jsk_spot_robot/spot_autowalk_data/autowalk/.gitignore b/jsk_spot_robot/spot_autowalk_data/autowalk/.gitignore
new file mode 100644
index 0000000000..72e8ffc0db
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/autowalk/.gitignore
@@ -0,0 +1 @@
+*
diff --git a/jsk_spot_robot/spot_autowalk_data/package.xml b/jsk_spot_robot/spot_autowalk_data/package.xml
new file mode 100644
index 0000000000..715f494d26
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/package.xml
@@ -0,0 +1,18 @@
+
+
+ spot_autowalk_data
+ 1.1.0
+ The spot_autowalk_data package
+
+ Kei Okada
+ Koki Shinjo
+ Koki Shinjo
+
+ BSD
+
+ catkin
+ jsk_data
+
+
+
+
diff --git a/jsk_spot_robot/spot_autowalk_data/scripts/download_autowalk_data.py b/jsk_spot_robot/spot_autowalk_data/scripts/download_autowalk_data.py
new file mode 100755
index 0000000000..7a2d8bc616
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/scripts/download_autowalk_data.py
@@ -0,0 +1,75 @@
+#!/usr/bin/env python
+
+from jsk_data import download_data
+
+
+def main():
+ PKG = 'spot_autowalk_data'
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_73B2_to_81C1.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1IDTCP7n4LCowizW3mFQvTOQtE4qOH9tx',
+ md5='65f09629c0ac2aa21df6f179c9875bd0',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_73B2_to_7FElevator.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1O8o6voq2v8WenfaUYcmpSU-IwJSsXW5_',
+ md5='ecd4d8dc043995f7675a59fce950676b',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_7FElevator_to_2FElevator.walk.tar.gz',
+ url='https://drive.google.com/uc?id=12MOg5okckmQlYiM6flkdeMYxqjn9-C9l',
+ md5='67ae3210cbfb55791fff6494f84abb3b',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_elevator_7FElevator_to_2FElevator.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1iyx0y1dPu4HUPMNepR_VaZd_WEaC5Lku',
+ md5='915916d084abd54c2c17f0738a726da3',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_2FElevator_to_2FEntrance.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1cYUn_qnRslWuH0ZMEBN6ovqmdcUB0MzY',
+ md5='78c6e1e8e5967b216c9f53e38893750e',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_2FElevator_to_MainGate.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1CIuStpjxIA188MLxUsfUjI-47Ev36Wiv',
+ md5='47d669bcb1394b97c95e5d77f78da3e5',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_2FElevator_to_eng8_2FElevator.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1oyU1ufqy9gryPXw8YZ45Ff7AR8K825dT',
+ md5='ac9a67567104df2ddd78b8c53fa61ba2',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng_TelephoneBox_to_HongoMainGate.walk.tar.gz',
+ url='https://drive.google.com/uc?id=120WC6SE4C_9XIvy0j3HEraljIigjcJ5U',
+ md5='6f89cd74bea3934171e0ae720747da24',
+ extract=True
+ )
+
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/spot_autowalk_data/scripts/view_map.py b/jsk_spot_robot/spot_autowalk_data/scripts/view_map.py
new file mode 100755
index 0000000000..966b2faa20
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/scripts/view_map.py
@@ -0,0 +1,391 @@
+#!/usr/bin/env python3
+# Copyright (c) 2021 Boston Dynamics, Inc. All rights reserved.
+#
+# Downloading, reproducing, distributing or otherwise using the SDK Software
+# is subject to the terms and conditions of the Boston Dynamics Software
+# Development Kit License (20191101-BDSDK-SL).
+
+from vtk.util import numpy_support
+import google.protobuf.timestamp_pb2
+import math
+import numpy as np
+import numpy.linalg
+import os
+import sys
+import time
+import vtk
+
+from bosdyn.api.graph_nav import map_pb2
+from bosdyn.api import geometry_pb2
+from bosdyn.client.frame_helpers import *
+from bosdyn.client.math_helpers import *
+"""
+This example shows how to load and view a graph nav map.
+
+"""
+
+
+def numpy_to_poly_data(pts):
+ """
+ Converts numpy array data into vtk poly data.
+ :param pts: the numpy array to convert (3 x N).
+ :return: a vtkPolyData.
+ """
+ pd = vtk.vtkPolyData()
+ pd.SetPoints(vtk.vtkPoints())
+ # Makes a deep copy
+ pd.GetPoints().SetData(numpy_support.numpy_to_vtk(pts.copy()))
+
+ f = vtk.vtkVertexGlyphFilter()
+ f.SetInputData(pd)
+ f.Update()
+ pd = f.GetOutput()
+
+ return pd
+
+
+def mat_to_vtk(mat):
+ """
+ Converts a 4x4 homogenous transform into a vtk transform object.
+ :param mat: A 4x4 homogenous transform (numpy array).
+ :return: A VTK transform object representing the transform.
+ """
+ t = vtk.vtkTransform()
+ t.SetMatrix(mat.flatten())
+ return t
+
+
+def vtk_to_mat(transform):
+ """
+ Converts a VTK transform object to 4x4 homogenous numpy matrix.
+ :param transform: an object of type vtkTransform
+ : return: a numpy array with a 4x4 matrix representation of the transform.
+ """
+ tf_matrix = transform.GetMatrix()
+ out = np.array(np.eye(4))
+ for r in range(4):
+ for c in range(4):
+ out[r, c] = tf_matrix.GetElement(r, c)
+ return out
+
+
+def api_to_vtk_se3_pose(se3_pose):
+ """
+ Convert a bosdyn SDK SE3Pose into a VTK pose.
+ :param se3_pose: the bosdyn SDK SE3 Pose.
+ :return: A VTK pose representing the bosdyn SDK SE3 Pose.
+ """
+ return mat_to_vtk(se3_pose.to_matrix())
+
+
+def create_fiducial_object(world_object, waypoint, renderer):
+ """
+ Creates a VTK object representing a fiducial.
+ :param world_object: A WorldObject representing a fiducial.
+ :param waypoint: The waypoint the AprilTag is associated with.
+ :param renderer: The VTK renderer
+ :return: a tuple of (vtkActor, 4x4 homogenous transform) representing the vtk actor for the fiducial, and its
+ transform w.r.t the waypoint.
+ """
+ fiducial_object = world_object.apriltag_properties
+ odom_tform_fiducial_filtered = get_a_tform_b(
+ world_object.transforms_snapshot, ODOM_FRAME_NAME,
+ world_object.apriltag_properties.frame_name_fiducial_filtered)
+ waypoint_tform_odom = SE3Pose.from_obj(waypoint.waypoint_tform_ko)
+ waypoint_tform_fiducial_filtered = api_to_vtk_se3_pose(
+ waypoint_tform_odom * odom_tform_fiducial_filtered)
+ plane_source = vtk.vtkPlaneSource()
+ plane_source.SetCenter(0.0, 0.0, 0.0)
+ plane_source.SetNormal(0.0, 0.0, 1.0)
+ plane_source.Update()
+ plane = plane_source.GetOutput()
+ mapper = vtk.vtkPolyDataMapper()
+ mapper.SetInputData(plane)
+
+ actor = vtk.vtkActor()
+ actor.SetMapper(mapper)
+ actor.GetProperty().SetColor(0.5, 0.7, 0.9)
+ actor.SetScale(fiducial_object.dimensions.x, fiducial_object.dimensions.y, 1.0)
+ renderer.AddActor(actor)
+ return actor, waypoint_tform_fiducial_filtered
+
+
+def create_point_cloud_object(waypoints, snapshots, waypoint_id):
+ """
+ Create a VTK object representing the point cloud in a snapshot. Note that in graph_nav, "point cloud" refers to the
+ feature cloud of a waypoint -- that is, a collection of visual features observed by all five cameras at a particular
+ point in time. The visual features are associated with points that are rigidly attached to a waypoint.
+ :param waypoints: dict of waypoint ID to waypoint.
+ :param snapshots: dict of waypoint snapshot ID to waypoint snapshot.
+ :param waypoint_id: the waypoint ID of the waypoint whose point cloud we want to render.
+ :return: a vtkActor containing the point cloud data.
+ """
+ wp = waypoints[waypoint_id]
+ snapshot = snapshots[wp.snapshot_id]
+ cloud = snapshot.point_cloud
+ odom_tform_cloud = get_a_tform_b(cloud.source.transforms_snapshot, ODOM_FRAME_NAME,
+ cloud.source.frame_name_sensor)
+ waypoint_tform_odom = SE3Pose.from_obj(wp.waypoint_tform_ko)
+ waypoint_tform_cloud = api_to_vtk_se3_pose(waypoint_tform_odom * odom_tform_cloud)
+
+ point_cloud_data = np.frombuffer(cloud.data, dtype=np.float32).reshape(int(cloud.num_points), 3)
+ poly_data = numpy_to_poly_data(point_cloud_data)
+ arr = vtk.vtkFloatArray()
+ for i in range(cloud.num_points):
+ arr.InsertNextValue(point_cloud_data[i, 2])
+ arr.SetName("z_coord")
+ poly_data.GetPointData().AddArray(arr)
+ poly_data.GetPointData().SetActiveScalars("z_coord")
+ actor = vtk.vtkActor()
+ mapper = vtk.vtkPolyDataMapper()
+ mapper.SetInputData(poly_data)
+ mapper.ScalarVisibilityOn()
+ actor.SetMapper(mapper)
+ actor.GetProperty().SetPointSize(2)
+ actor.SetUserTransform(waypoint_tform_cloud)
+ return actor
+
+
+def create_waypoint_object(renderer, waypoints, snapshots, waypoint_id):
+ """
+ Creates a VTK object representing a waypoint and its point cloud.
+ :param renderer: The VTK renderer.
+ :param waypoints: dict of waypoint ID to waypoint.
+ :param snapshots: dict of snapshot ID to snapshot.
+ :param waypoint_id: the waypoint id of the waypoint object we wish to create.
+ :return: A vtkAssembly representing the waypoint (an axis) and its point cloud.
+ """
+ assembly = vtk.vtkAssembly()
+ actor = vtk.vtkAxesActor()
+ actor.SetXAxisLabelText("")
+ actor.SetYAxisLabelText("")
+ actor.SetZAxisLabelText("")
+ actor.SetTotalLength(0.2, 0.2, 0.2)
+ point_cloud_actor = create_point_cloud_object(waypoints, snapshots, waypoint_id)
+ assembly.AddPart(actor)
+ assembly.AddPart(point_cloud_actor)
+ renderer.AddActor(assembly)
+ return assembly
+
+
+def make_line(pt_A, pt_B, renderer):
+ """
+ Creates a VTK object which is a white line between two points.
+ :param pt_A: starting point of the line.
+ :param pt_B: ending point of the line.
+ :param renderer: the VTK renderer.
+ :return: A VTK object that is a while line between pt_A and pt_B.
+ """
+ line_source = vtk.vtkLineSource()
+ line_source.SetPoint1(pt_A[0], pt_A[1], pt_A[2])
+ line_source.SetPoint2(pt_B[0], pt_B[1], pt_B[2])
+ mapper = vtk.vtkPolyDataMapper()
+ mapper.SetInputConnection(line_source.GetOutputPort())
+
+ actor = vtk.vtkActor()
+ actor.SetMapper(mapper)
+ actor.GetProperty().SetLineWidth(2)
+ actor.GetProperty().SetColor(0.7, 0.7, 0.7)
+ renderer.AddActor(actor)
+ return actor
+
+
+def make_text(name, pt, renderer):
+ """
+ Creates white text on a black background at a particular point.
+ :param name: The text to display.
+ :param pt: The point in the world where the text will be displayed.
+ :param renderer: The VTK renderer
+ :return: the vtkActor representing the text.
+ """
+ actor = vtk.vtkTextActor()
+ actor.SetInput(name)
+ prop = actor.GetTextProperty()
+ prop.SetBackgroundColor(0.0, 0.0, 0.0)
+ prop.SetBackgroundOpacity(0.5)
+ prop.SetFontSize(16)
+ coord = actor.GetPositionCoordinate()
+ coord.SetCoordinateSystemToWorld()
+ coord.SetValue((pt[0], pt[1], pt[2]))
+
+ renderer.AddActor(actor)
+ return actor
+
+
+def create_edge_object(curr_wp_tform_to_wp, world_tform_curr_wp, renderer):
+ # Concatenate the edge transform.
+ world_tform_to_wp = np.dot(world_tform_curr_wp, curr_wp_tform_to_wp)
+ # Make a line between the current waypoint and the neighbor.
+ make_line(world_tform_curr_wp[:3, 3], world_tform_to_wp[:3, 3], renderer)
+ return world_tform_to_wp
+
+
+def load_map(path):
+ """
+ Load a map from the given file path.
+ :param path: Path to the root directory of the map.
+ :return: the graph, waypoints, waypoint snapshots and edge snapshots.
+ """
+ with open(os.path.join(path, "graph"), "rb") as graph_file:
+ # Load the graph file and deserialize it. The graph file is a protobuf containing only the waypoints and the
+ # edges between them.
+ data = graph_file.read()
+ current_graph = map_pb2.Graph()
+ current_graph.ParseFromString(data)
+
+ # Set up maps from waypoint ID to waypoints, edges, snapshots, etc.
+ current_waypoints = {}
+ current_waypoint_snapshots = {}
+ current_edge_snapshots = {}
+
+ # For each waypoint, load any snapshot associated with it.
+ for waypoint in current_graph.waypoints:
+ current_waypoints[waypoint.id] = waypoint
+
+ # Load the snapshot. Note that snapshots contain all of the raw data in a waypoint and may be large.
+ file_name = os.path.join(path, "waypoint_snapshots", waypoint.snapshot_id)
+ if not os.path.exists(file_name):
+ continue
+ with open(file_name, "rb") as snapshot_file:
+ waypoint_snapshot = map_pb2.WaypointSnapshot()
+ waypoint_snapshot.ParseFromString(snapshot_file.read())
+ current_waypoint_snapshots[waypoint_snapshot.id] = waypoint_snapshot
+ # Similarly, edges have snapshot data.
+ for edge in current_graph.edges:
+ file_name = os.path.join(path, "edge_snapshots", edge.snapshot_id)
+ if not os.path.exists(file_name):
+ continue
+ with open(file_name, "rb") as snapshot_file:
+ edge_snapshot = map_pb2.EdgeSnapshot()
+ edge_snapshot.ParseFromString(snapshot_file.read())
+ current_edge_snapshots[edge_snapshot.id] = edge_snapshot
+ print("Loaded graph with {} waypoints and {} edges".format(
+ len(current_graph.waypoints), len(current_graph.edges)))
+ return (current_graph, current_waypoints, current_waypoint_snapshots,
+ current_edge_snapshots)
+
+
+def create_graph_objects(current_graph, current_waypoint_snapshots, current_waypoints, renderer):
+ """
+ Creates all the VTK objects associated with the graph.
+ :param current_graph: the graph to use.
+ :param current_waypoint_snapshots: dict from snapshot id to snapshot.
+ :param current_waypoints: dict from waypoint id to waypoint.
+ :param renderer: The VTK renderer
+ :return: the average position in world space of all the waypoints.
+ """
+ waypoint_objects = {}
+ # Create VTK objects associated with each waypoint.
+ for waypoint in current_graph.waypoints:
+ waypoint_objects[waypoint.id] = create_waypoint_object(renderer, current_waypoints,
+ current_waypoint_snapshots,
+ waypoint.id)
+ # Now, perform a breadth first search of the graph starting from an arbitrary waypoint. Graph nav graphs
+ # have no global reference frame. The only thing we can say about waypoints is that they have relative
+ # transformations to their neighbors via edges. So the goal is to get the whole graph into a global reference
+ # frame centered on some waypoint as the origin.
+ queue = []
+ queue.append((current_graph.waypoints[0], np.eye(4)))
+ visited = {}
+ # Get the camera in the ballpark of the right position by centering it on the average position of a waypoint.
+ avg_pos = np.array([0.0, 0.0, 0.0])
+
+ # Breadth first search.
+ while len(queue) > 0:
+ # Visit a waypoint.
+ curr_element = queue[0]
+ queue.pop(0)
+ curr_waypoint = curr_element[0]
+ visited[curr_waypoint.id] = True
+
+ # We now know the global pose of this waypoint, so set the pose.
+ waypoint_objects[curr_waypoint.id].SetUserTransform(mat_to_vtk(curr_element[1]))
+ world_tform_current_waypoint = curr_element[1]
+ # Add text to the waypoint.
+ print('{}: {}'.format(curr_waypoint.annotations.name, curr_waypoint.id))
+ make_text(
+ '{}: {}'.format(curr_waypoint.annotations.name, curr_waypoint.id),
+ world_tform_current_waypoint[:3, 3],
+ renderer)
+
+ # For each fiducial in the waypoint's snapshot, add an object at the world pose of that fiducial.
+ if (curr_waypoint.snapshot_id in current_waypoint_snapshots):
+ snapshot = current_waypoint_snapshots[curr_waypoint.snapshot_id]
+ for fiducial in snapshot.objects:
+ if fiducial.HasField("apriltag_properties"):
+ (fiducial_object,
+ curr_wp_tform_fiducial) = create_fiducial_object(fiducial, curr_waypoint,
+ renderer)
+ world_tform_fiducial = np.dot(world_tform_current_waypoint,
+ vtk_to_mat(curr_wp_tform_fiducial))
+ fiducial_object.SetUserTransform(mat_to_vtk(world_tform_fiducial))
+ make_text(
+ 'fid: {}'.format(fiducial.apriltag_properties.tag_id), world_tform_fiducial[:3, 3],
+ renderer)
+
+ # Now, for each edge, walk along the edge and concatenate the transform to the neighbor.
+ for edge in current_graph.edges:
+ # If the edge is directed away from us...
+ if edge.id.from_waypoint == curr_waypoint.id and edge.id.to_waypoint not in visited:
+ current_waypoint_tform_to_waypoint = SE3Pose.from_obj(
+ edge.from_tform_to).to_matrix()
+ world_tform_to_wp = create_edge_object(current_waypoint_tform_to_waypoint,
+ world_tform_current_waypoint, renderer)
+ # Add the neighbor to the queue.
+ queue.append((current_waypoints[edge.id.to_waypoint], world_tform_to_wp))
+ avg_pos += world_tform_to_wp[:3, 3]
+ # If the edge is directed toward us...
+ elif edge.id.to_waypoint == curr_waypoint.id and edge.id.from_waypoint not in visited:
+ current_waypoint_tform_from_waypoint = (SE3Pose.from_obj(
+ edge.from_tform_to).inverse()).to_matrix()
+ world_tform_from_wp = create_edge_object(current_waypoint_tform_from_waypoint,
+ world_tform_current_waypoint, renderer)
+ # Add the neighbor to the queue.
+ queue.append((current_waypoints[edge.id.from_waypoint], world_tform_from_wp))
+ avg_pos += world_tform_from_wp[:3, 3]
+ return avg_pos
+
+
+def main(argv):
+ # Load the map from the given file.
+ path = argv[0]
+ (current_graph, current_waypoints, current_waypoint_snapshots,
+ current_edge_snapshots) = load_map(path)
+
+ # Create the renderer.
+ renderer = vtk.vtkRenderer()
+ renderer.SetBackground(0.05, 0.1, 0.15)
+
+ avg_pos = create_graph_objects(current_graph, current_waypoint_snapshots, current_waypoints,
+ renderer)
+
+ # Compute the average waypoint position to place the camera appropriately.
+ avg_pos /= len(current_waypoints)
+ camera_pos = avg_pos + np.array([-1, 0, 5])
+
+ camera = renderer.GetActiveCamera()
+ camera.SetViewUp(0, 0, 1)
+ camera.SetPosition(camera_pos[0], camera_pos[1], camera_pos[2])
+
+ # Create the VTK renderer and interactor.
+ renderWindow = vtk.vtkRenderWindow()
+ renderWindow.SetWindowName(path)
+ renderWindow.AddRenderer(renderer)
+ renderWindowInteractor = vtk.vtkRenderWindowInteractor()
+ renderWindowInteractor.SetRenderWindow(renderWindow)
+ renderWindow.SetSize(1280, 720)
+ style = vtk.vtkInteractorStyleTerrain()
+ renderWindowInteractor.SetInteractorStyle(style)
+ renderer.ResetCamera()
+
+ # Start rendering.
+ renderWindow.Render()
+ renderWindow.Start()
+ renderWindowInteractor.Start()
+
+
+if __name__ == '__main__':
+ if (len(sys.argv) != 2):
+ print("Usage: view_map.py ")
+ sys.exit(-1)
+ main(sys.argv[1:])