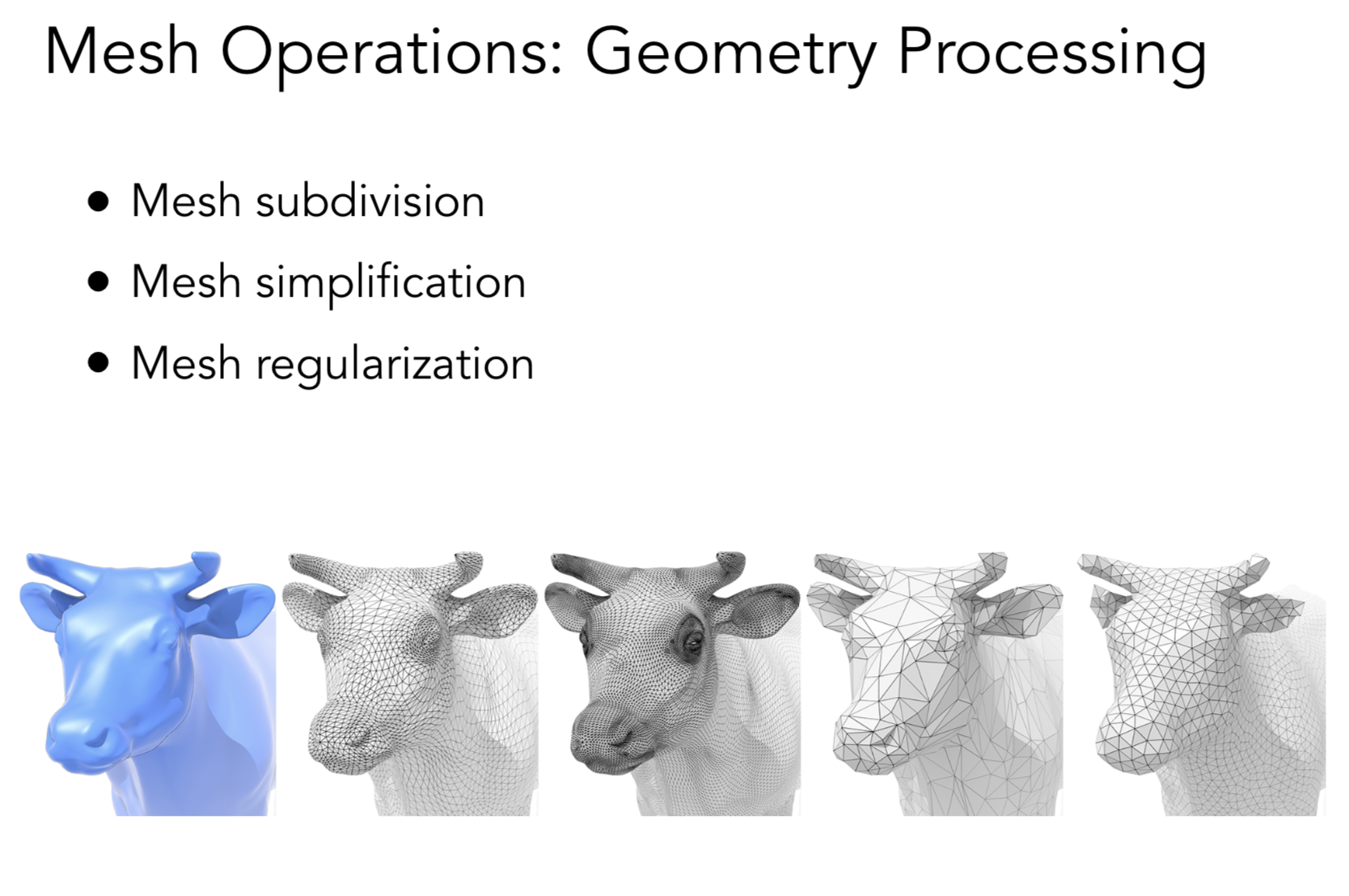
subdivision 细分 regularization 正规化 使用相同的三角形来表达
Loop 细分: 先细分, 再调整 (但是 Loop 细分仅适用于三角形网格)
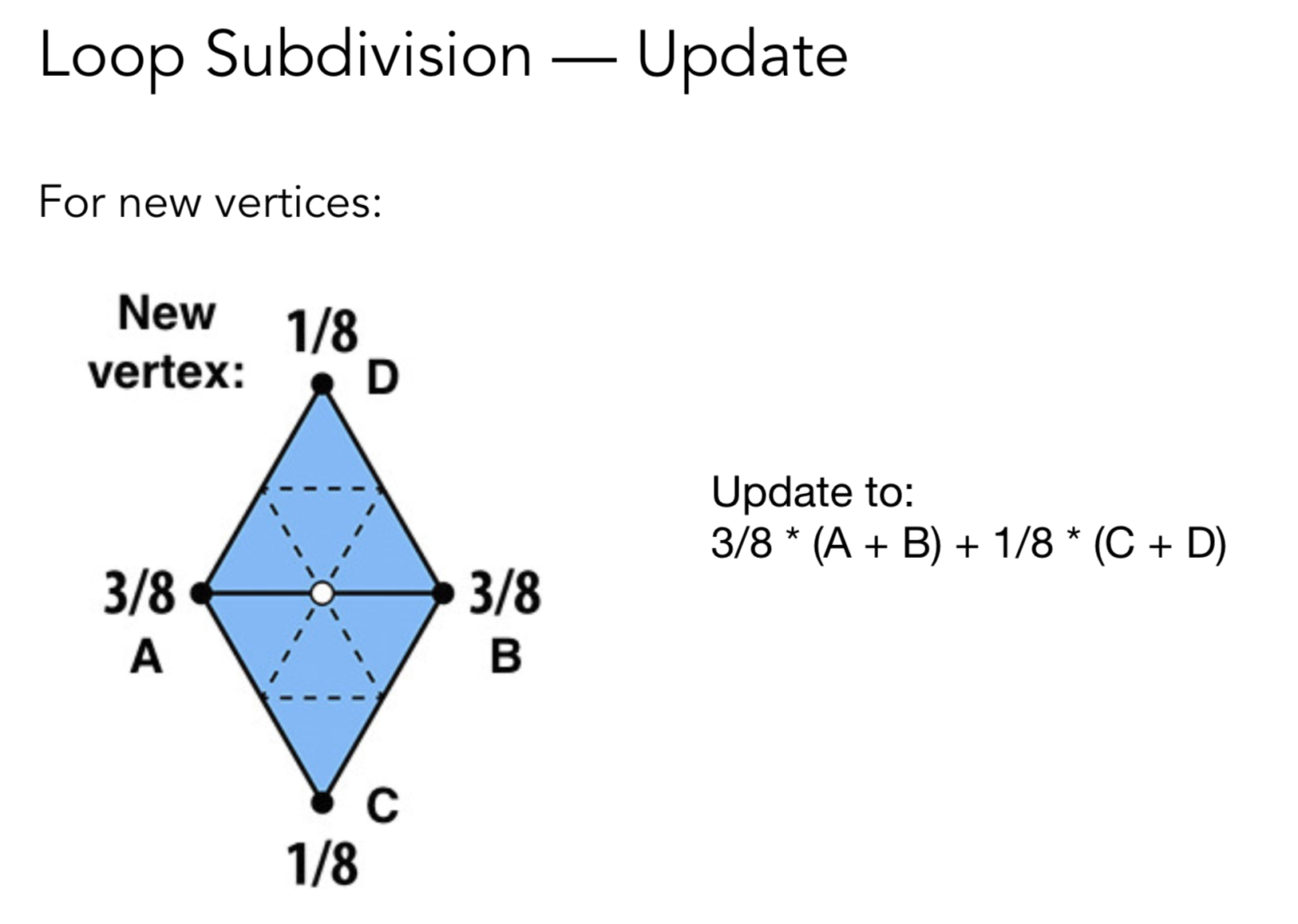
新顶点的位置 (图中白点为例子) 是原来 ABCD 取加权平均得到
旧顶点的位置
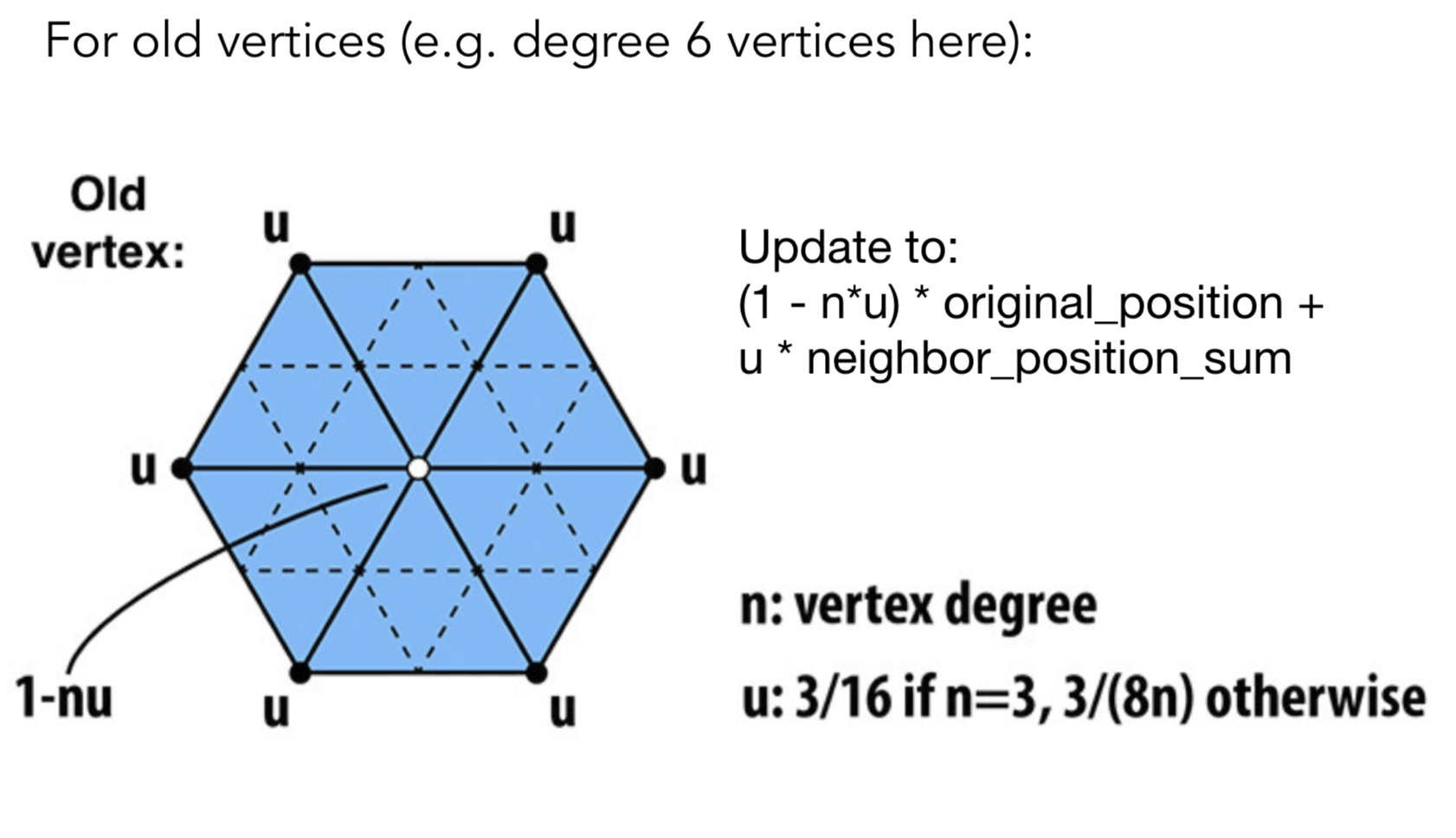
旧顶点的新位置由周围的顶点位置 和 自己原来的位置 共同决定. n 表示顶点的度 u 是和顶点的度有关的一个数
由于Loop 只能用在三角形网格, 对于四边形网格怎么办呢?
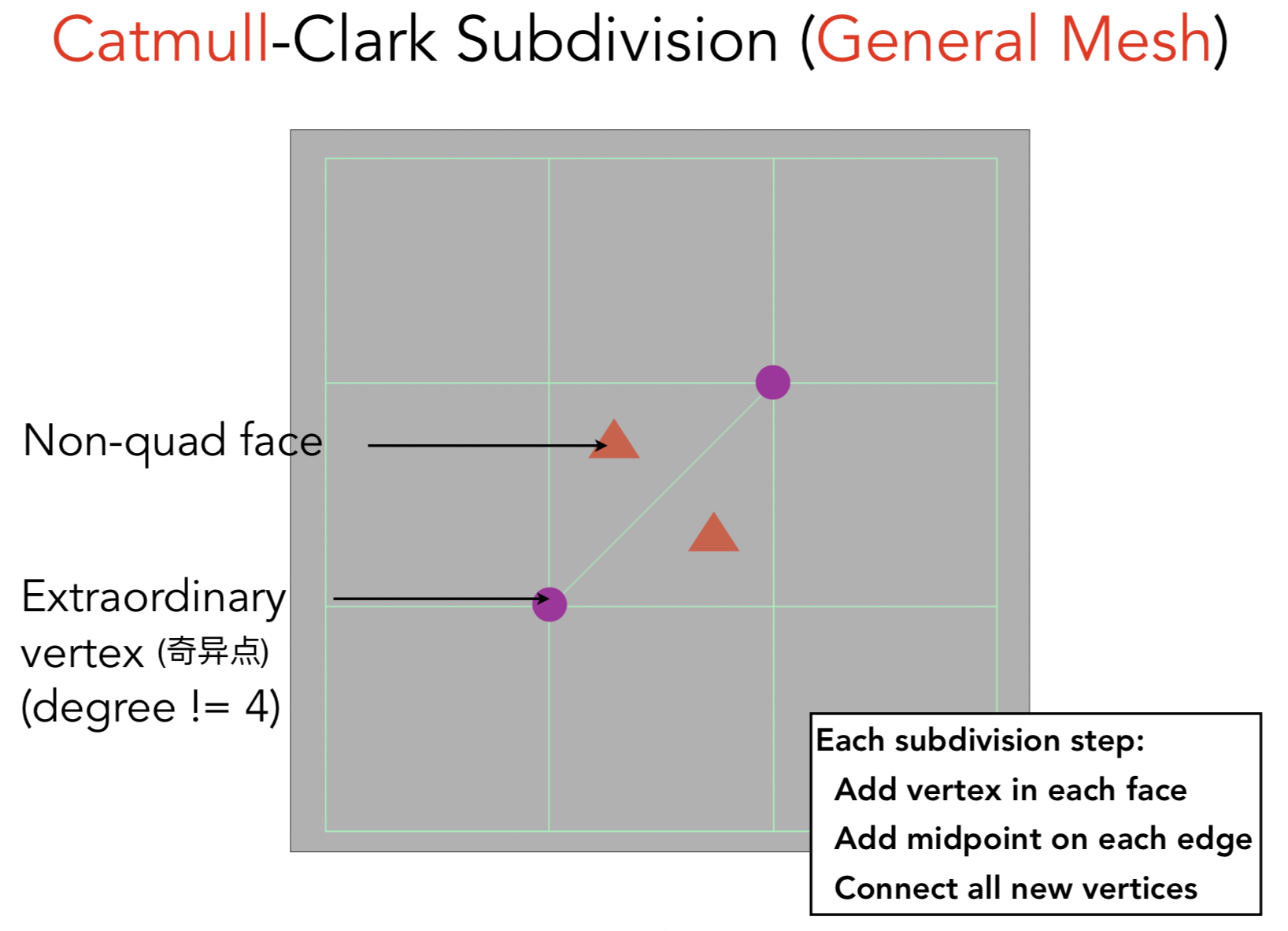
在面中间取一个点
在非四边形面内加上点, 是奇异点 (本次操作相比之前, 原来三角形面中间有两个度是3的点)
经过一次操作后, 都是四边形面了, 原来2个非四边形面(三角形), 现在2个奇异点.
在没有了非四边形面之后, 奇异点也不会增加了.
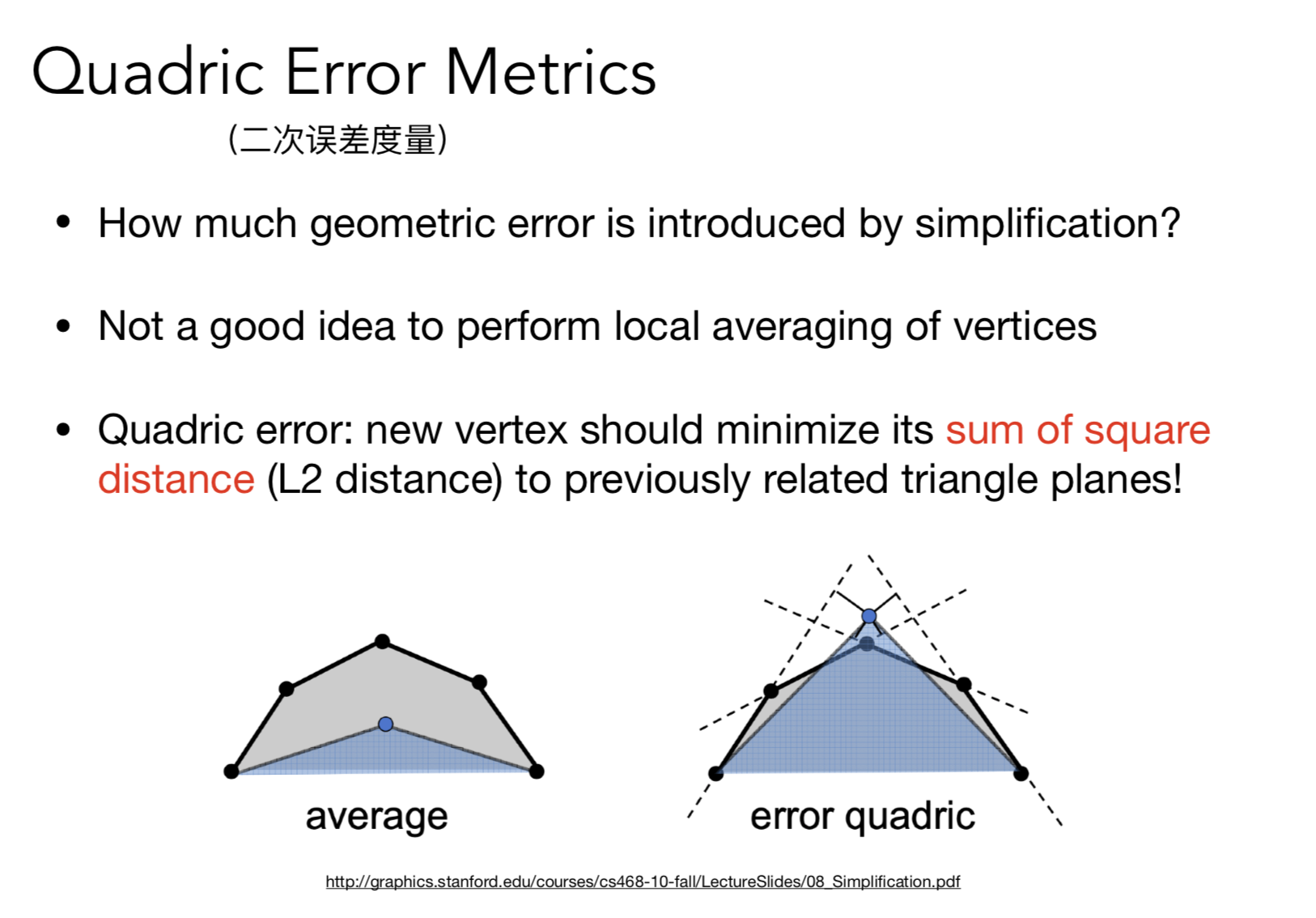
减少一个边 , 同时这边边的两个顶点变为一个顶点
但是坍缩哪一条边呢?

引入一个新的点, 使得这个点和 原来相关连的点所在的面 的距离 平方和 最小
因此要做的事情就是每一条边都遍历, 每次都找出对当前改变最小的边.
对于每次删除之后都要剩下的全局最优解, 使用堆结构最合适. (堆中元素的排列不是按照到来的先后顺序,而是按照一定的优先顺序排列的。)
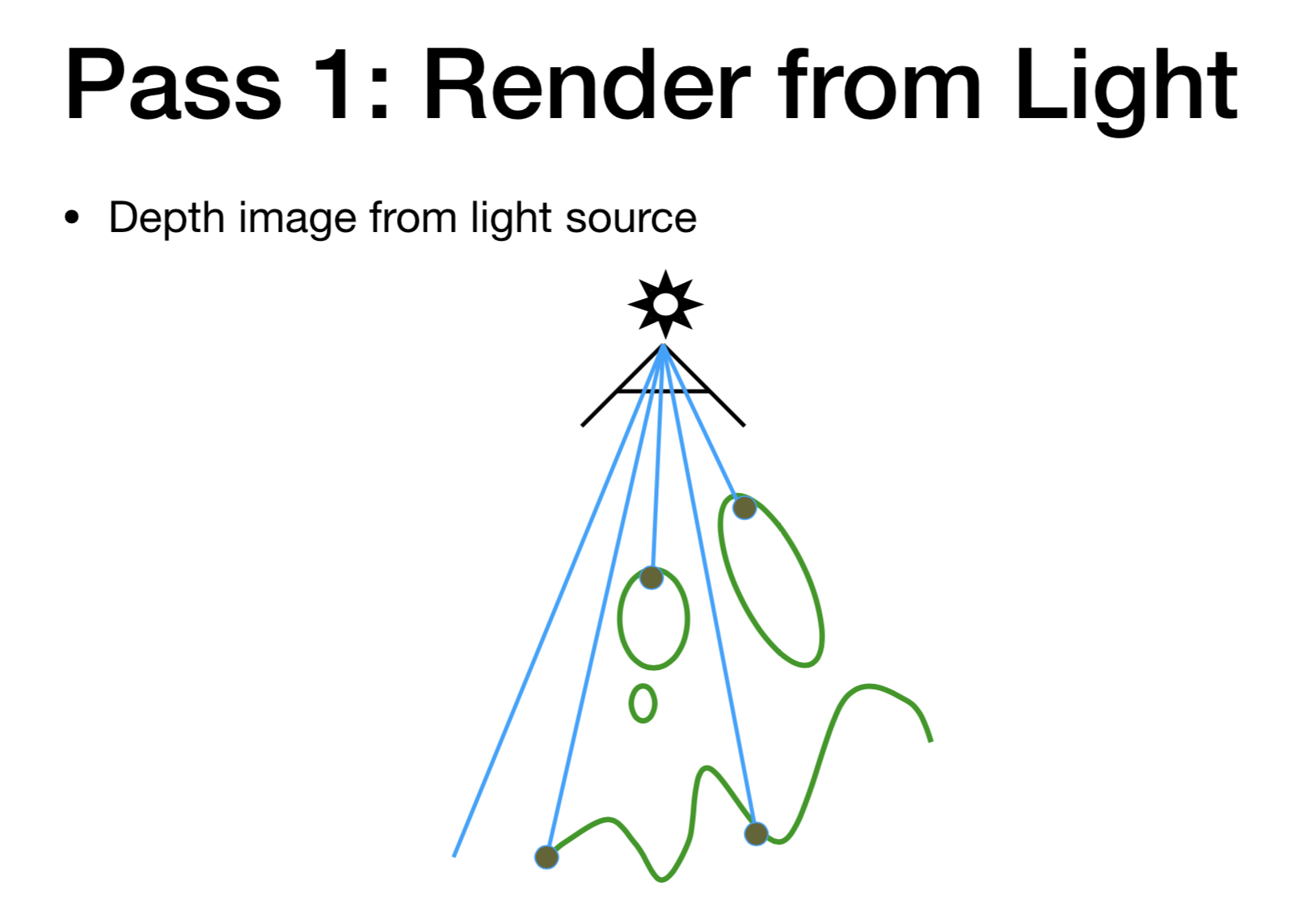
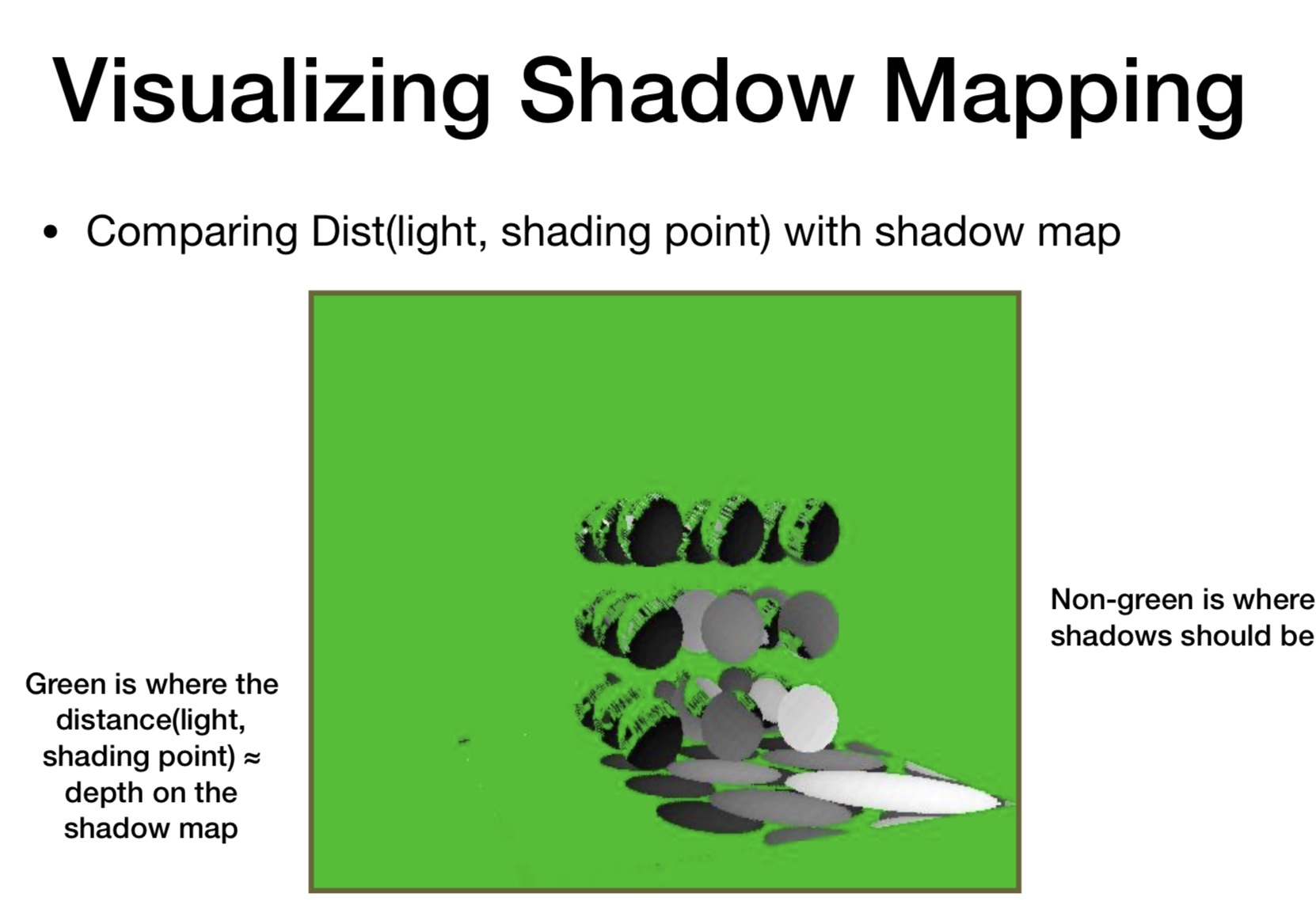
光栅化中的阴影: 使用shadow Mapping, 在生成阴影的时候, 不需要知道场景几何信息
经典的shadow mapping 只能处理点光源
- 从光源看向场景, 记录深度(光源到物体的距离, 考虑被遮挡的情况, 一些光根本照不到物体. 所以很多物体不能从光源处看到)
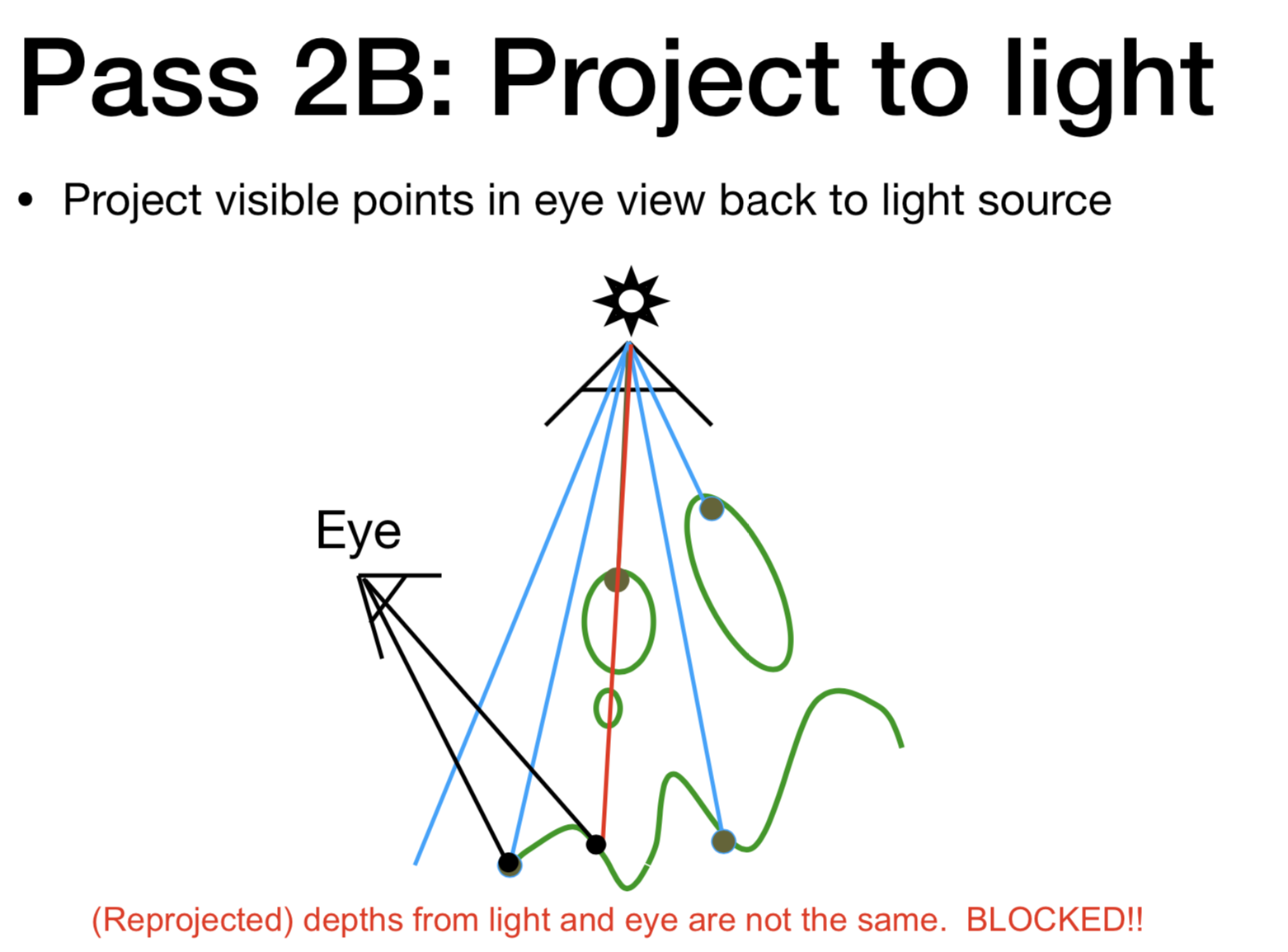
- 从摄像机出发, 看到的场景再投射回光源, 计算深度(点到光源的距离, 不考虑被遮挡)
- 对比两个距离, 如果不一样, 表示存在遮挡(阴影).
Unity实时阴影实现图解 这里对阴影也有一些说明
第一次渲染中以光源位置作为视点,基于 Z-buffering 算法,将每个像素点的深度值(z-depth)也就是距离光源最近的对象距离记录在 Z-buffer 中,输出到 FBO(Framebuffer Object) 关联的 texture 中,生成 Shadow Map。
第二次场景渲染时,以正常摄像机作为视点,将每个 fragment 到光源的距离和 Shadow Map 中保存的深度值进行比较,如果大于后者则说明被其他物体遮挡处于阴影之中。
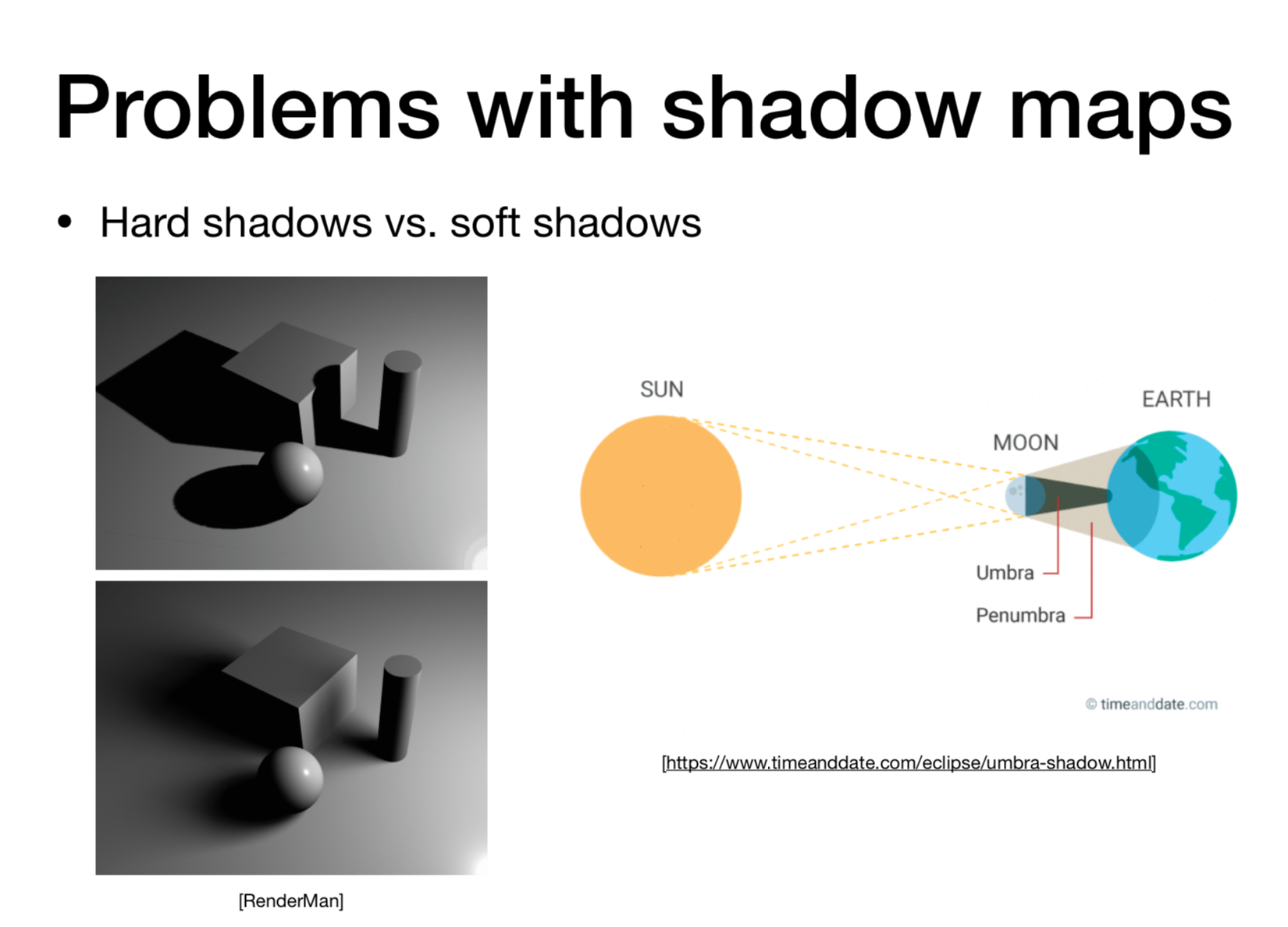
本影Umbra 半影PreUmbra 和光源大小有关.
软阴影 硬阴影 区别: 硬阴影的边缘很锐利, 清晰.