Python Distance Map library
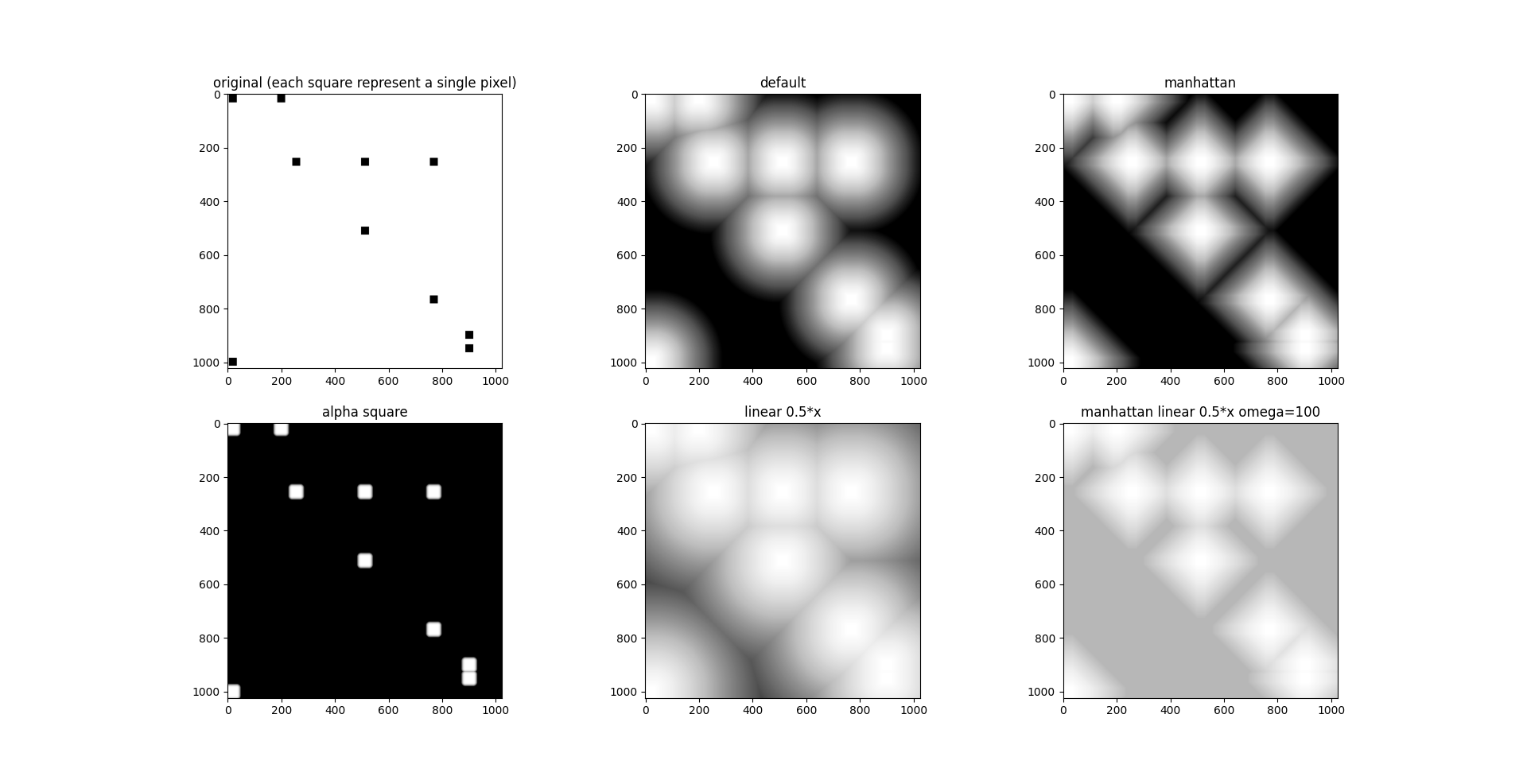
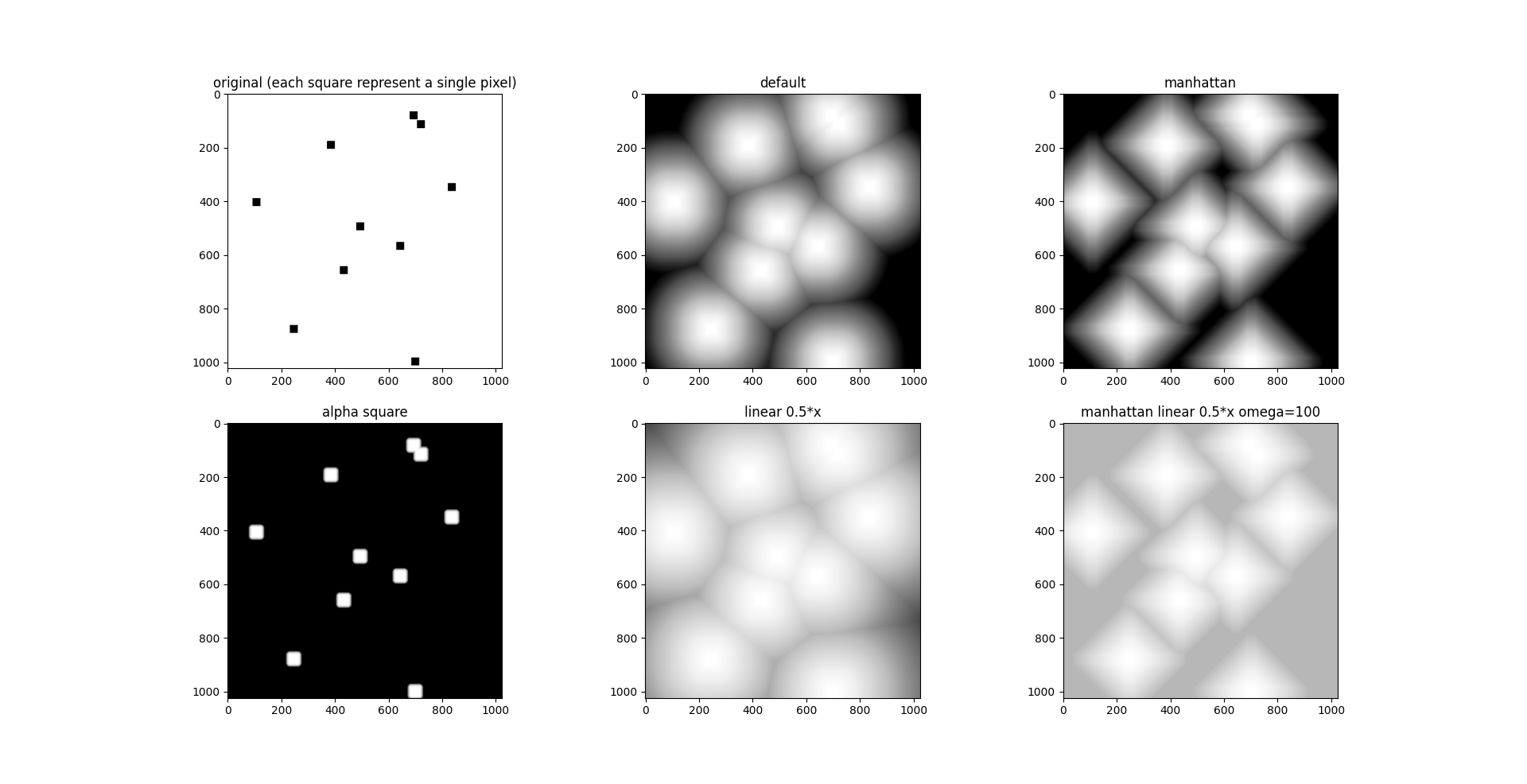
For a N-dimension (2 ≤ N ≤ 3) binary matrix, return the corresponding distance map. For each pixel, the value is equal to the minimum distance to a "positive" pixel. Due to the way I plan to use this library, the implementation is in reality articulate over a list of positive points positions and not a binary matrix.
Δ = distance to nearest positive point
α = a user defined function (ℝ+ → ℝ+) (default : x ↦ x)
Ω = the maximum value
P_result(x, y) = min(α(Δ), Ω)
pip install distance-map
import distancemap as dm
dm.distance_map(input.shape, points)
dm.distance_map_from_binary_matrix(input)
Examples of usage : test.py.
Input is a list of positive points
distance_map(input.shape, points)
Input is binary (boolean) matrix
distance_map_from_binary_matrix(input)
Input is a list of positive points and you want to use custom arguments
distance_map(input.shape, points, distance="manhattan", beta=15.0, alpha="square")
Parameters
- Distance
- euclidean
- manhattan
- Alpha
- identity (x ↦ x)
- square (x ↦ x*x)
- linear (x ↦ A*x + B)
- use set_a(a) and def set_b(b) to change A and B values
The following tests has been made on a laptop with an Intel Core i7-7700HQ and 24Go of RAM.
| Test | Time distance_map | Time distance_map_from_binary_matrix |
|---|---|---|
| 2D 1024 x 1024 image with 10 positive points | 8ms | 11ms |
| 2D 1024 x 1024 image with 5 positive points | 5ms | 9ms |
| 3D 128 x 128 x 128 image with 10 positive points | 61ms | 148ms |
This library is inspired for use as in the following paper.
N. Xu, B. Price, S. Cohen, J. Yang and T. Huang
"Deep Interactive Object Selection"
2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Las Vegas, NV, 2016, pp. 373-381
doi: 10.1109/CVPR.2016.47