
Code repository for the under review IROS submission
"Detection-Tracking for Efficient Person Analysis: The DetTA Pipeline"
Stefan Breuers, Lucas Beyer, Umer Rafi and Bastian Leibe (RWTH Aachen University, Visual Computing Institute)
arXiv preprint: https://arxiv.org/abs/1804.10134
- detection-tracking pipeline provides both region of interest and track ID
- this allows for running further analysis modules (e.g. head/body pose) and integrating temporal information of the observation for each tracked person, resulting in a smoother analysis signal
- furthermore this allows for a "free-flight"-mode, where you only run (potentially expensive) analysis modules with a certain stride and rely on the predicition of the temporal filters inbetween, resulting in a performance boost
- code can be extended to support further analysis modules
In the past decade many robots were deployed in the wild, and people detection and tracking is an important component of such deployments. On top of that, one often needs to run modules which analyze persons and extract higher level attributes such as age and gender, or dynamic information like gaze and pose. The latter ones are especially necessary for building a reactive, social robot-person interaction.
In this paper, we combine those components in a fully modular detection-tracking-analysis pipeline, called DetTA. We investigate the benefits of such an integration on the example of head and skeleton pose, by using the consistent track ID for a temporal filtering of the analysis modules' observations, showing a slight improvement in a challenging real-world scenario. We also study the potential of a so-called "free-flight" mode, where the analysis of a person attribute only relies on the filter's predictions for certain frames. Here, our study shows that this boosts the runtime dramatically, while the prediction quality remains stable. This insight is especially important for reducing power consumption and sharing precious (GPU-)memory when running many analysis components on a mobile platform, especially so in the era of expensive deep learning methods.
Please regard that the repository consist of several submodules, which need to be initialized after cloning:
- git clone https://github.com/sbreuers/detta.git
- (cd to repo)
- git submodule update --init
In our experiments we focused on vision-based analysis modules and thus used two vision based people detetors: depth-based upperbody detector by Jafari et al. [1] and RGB-based groundHOG bei Sudowe et. al [2].
Regarding tracking, we utilized the vision-based MDL tracker by Jafari et al. [1]: Basically bi-directional Kalman Filters to build an overcomplete set of hypotheses. An individual track score based on appearance motion and detector confidence as well as interaction scores between tracks based on physical overlap and shared detections are computed. A solution is found with quadratic pseudo boolean optimization by a multi-branch method.
The pipeline is highly modular and can be extended with more detector and tracking methods (e.g. laser-based) when it is needed for futher analysis modules. Please refer to https://github.com/spencer-project/spencer_people_tracking for details on the modular detection-tracking pipeline.
Biternion nets by Beyer et al. [3]: We predict head orientation using BiternionNets, for which code is publicly available. Training data is collected at an airport by having volunteers turn in circles in front of our robot, the annotation is straightforward and done in just a few hours. Biternions have the advantage of providing continuous head pose estimates, which are better suited for filtering than classes, even when trained on discrete labels. The network architecture is exactly the very lightweight one introduced in [3], but we further perform background-subtraction using the depth data provided by the camera.
HumanPose by Rafi et al. [4]: For skeleton poses, we use the HumanPose estimation framework. The framework is an adaptation of GoogleNet, using only the first 17 layers from the network architecture. The fully connected layer and the average pooling layer in the last stages of the network are removed to make the framework fully convolutional. A pose decoder consisting of a transposed convolution and a sigmoid layer is appended to the framework to up-sample the low resolution features from the 17th layer to high resolution heat maps for different body joints. The HumanPose estimation framework was trained on the MPI dataset and is also able to also detect occluded joints.
For reproduceability, we also provide the analysis models which we have used in our paper's evaluations.
Note that if your environment is significantly different, you might need to collect your own data and train your own models.
Make sure to place the model files in the models subfolder of the corresponding analysis module.
- The BiternionNet model for head-orientation (MD5:
4668316c5f400f646f6dd0d48e30db24) - The HumanPose model for, well, human pose (MD5:
24a02547b38f46cfbcb6f70e53b205b3)
By using the output boxes with a consistent person IDs coming from the detection-tracking part, one can run individual (vision-based) analysis modules on each person and at the same time apply temporal filtering. This would otherwise not be possible, as the input region (e.g. the bounding box) as well as the mapping to different persons in the scene (track ID). This also allows for a "free flight"-mode (see below). Note that the temporal integration can be made as long as there the tracking remains consistent, i.e., if there is an ID switch, a new filter needs to be initialized.
Files:
smoother.pyutilizes the filterpy library to give potential access to all its implemented filters (for details see https://github.com/rlabbe/filterpy).smoother2.pyis our own implementation of the G-Filter, GH-Filter and Kalman-Filter and is used in our experiments.
Example:
- Make sure that a detection-tracking pipeline is up and running ,e.g., the SPENCER framework from above or the STRANDS framework; has been successfully tested with both ones, just make sure
TrackedPersons2Dmessages are published for 2d analysis modules - An example for two analysis modules and the usage of the filters can be found in
scripts/predict.pyof BiternionNets-ROS (one temporal filter for each head) and inscripts/skeletons.pyof skeletons_cnn_pytorch (16 individual filters for all 16 joints); both are working with theTrackedPersons2Dmessage type- roslaunch biternion predict_{strands,spencer}.launch [smooth:={true,false}] [stride:={..}]
- roslaunch skeletons_cnn_pytorch pose_cnn_pytorch[_{strands,spencer}].launch [smooth:={true,false}] [stride:={..}]
self.smoother_dictis created during the initialization of the class analysis module, keeping all the filters as value in a dictionary with the trackID as key (can be also done inside the launch file if you use the command-string)- to get the trackID, the analysis modules needs to subscribe to the trackedPerson topic, coming from the tracker
- the
self.smoother_dictis then automatically updated inside the callback function of the analysis module
- With the free-flight option we rely on the filters' prediction instead of running the (potentially expensive) analysis modules each frame.
- By setting a
self.stridehigher than 1 in the above examples the free-flight mode is automatically activated (can also be adjusted in the launch file) - Depending on the used stride and the used analysis module, the quality may drop a little (especially for large strides for attributes with complex motion behaviour), while the performance may get a huge boost (even already for smaller strides, starting from 2)
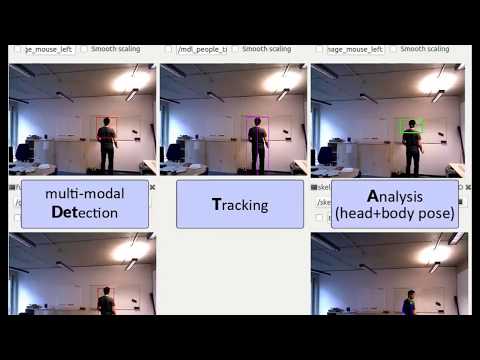
 Example for single person, showing the upperbody detector (top left), fullbody groundHog detector (bottom left), tracking (middle), head orientation (top right) and skeleton pose (bottom right).
Example for single person, showing the upperbody detector (top left), fullbody groundHog detector (bottom left), tracking (middle), head orientation (top right) and skeleton pose (bottom right).
 Another example for a single person, close to the robot.
Another example for a single person, close to the robot.
 and the prediction (blue) gets filtered to the smoothed estimation (green).") Example for multiple persons, focus on head orientation. Note how the noisy measurement (red) and the prediction (blue) gets filtered to the smoothed estimation (green).
Example for multiple persons, focus on head orientation. Note how the noisy measurement (red) and the prediction (blue) gets filtered to the smoothed estimation (green).
 gets smoothed (blue) with the prediction (not shown here) to increase the performance.") Example for multiple persons, focus on skeleton pose. The measurement (red) gets smoothed (blue) with the prediction (not shown here) to increase the performance.
Example for multiple persons, focus on skeleton pose. The measurement (red) gets smoothed (blue) with the prediction (not shown here) to increase the performance.

In case you face your own annotation task regarding skeleton poses, we provide our MATLAB tool.
The skeleton_annotation_tool.m let you annotate joints, the skeleton_viewer.m helps in visualizing already annotated persons.
Usage: The tool goes through the images in the provided folder (adapt main_path and seq_path regarding your purpose). It expects images (img_path, default: {main_path}/{seq_path}/img/img_%08d.jpg) and an annotation file (anno_path, default: {main_path}/{seq_path}/annotations.txt in the MOTChallenge format (https://motchallenge.net/instructions/).
The tool then lets you annotate the joints via left mouse click in the following order: head, neck, left shoulder/elbow/wrist, right shoulder/elbow/wrist (joint_names) and saves everything in a subfolder structure (save_folder, save_path, save_path_occ).
To minimize annotation effort, one can adapt a step size (anno_step), frames inbetween are interpolated. We suggest not to choose a value to high depending on the sequence due to annotation noise.
Buttons:
- left-click to annotate the current joint (red color)
- right-click to set the current joint to "occluded" (blue color)
- "s" to skip this frame (set all joints to occluded)
- "r" to redo the last annotated joint (unfortunately does not work across frames, so be careful with the last joint)
- "c" to redo all joints in this frame
The tool can be closed at any time and it will restart after the last fully annotated frame of one person.
Parts of the code can be adapted to serve any "point annotation"-task. Just take care of the joint_names variable and the annotation loop regarding frames and ids.
Stefan Breuers, [email protected]
[1] Jafari O. H. and Mitzel D. and Leibe B.. Real-Time RGB-D based People Detection and Tracking for Mobile Robots and Head-Worn Cameras. IEEE International Conference on Robotics and Automation (ICRA), 2014.
[2] Sudowe P, and Leibe B.. Efficient use of geometric constraints for sliding-window object detection in video. International Conference on Computer Vision Systems (ICCVS), 2011.
[3] Beyer L. and Hermans A. and Leibe B.. Biternion nets: Continuous head pose regression from discrete training labels. German Conference on Pattern Recognition (GCPR), 2015.
[4] Rafi U. and Leibe B. and Gall J.. An Efficient Convolutional Network for Human Pose Estimation. British Machine Vision Conference (BMVC), 2016.