forked from jsk-ros-pkg/jsk_robot
-
Notifications
You must be signed in to change notification settings - Fork 1
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Add spot_autowalk_data package and jsk_spot_behaviors packages (#26)
* [spot_autowalk_data] add spot_autowalk_data package * [jsk_spot_behaviors] add jsk_spot_behaviors packages * [spot_autowalk_data] add .gitignore file to autowalk directory * [spot_autowalk_data] add README.md * [jsk_spot_behaviors] add README.md * [jsk_spot_behaviors] Update README.md * [spot_basic_behaviors] add README.md * [spot_basic_behaviors] Update README.md * [spot_behavior_manager_demo] add README.md * [jsk_spot_behaviors] Update README.md * [spot_basic_behaviors][spot_behavior_manager][spot_behavior_manager_demo] fix bugs * [spot_basic_behaviors] update elevator detections * [jsk_spot_robot] update package.xml * [jsk_spot_robot] update rosinstall to support tf_relay
- Loading branch information
1 parent
56d8db0
commit d46c69e
Showing
37 changed files
with
1,905 additions
and
3 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,49 @@ | ||
| # jsk_spot_behaviors | ||
|
|
||
| These packages enable for Spot to execute locomotoion behaviors to reach a desired position. | ||
|
|
||
| ## Concept | ||
|
|
||
| In this framework, knowledge about positions and transtion behaviors between them are represented as a digraph like below. | ||
|
|
||
| Each node represents specified positions and each edge represents a behavior to transition between them. | ||
|
|
||
| 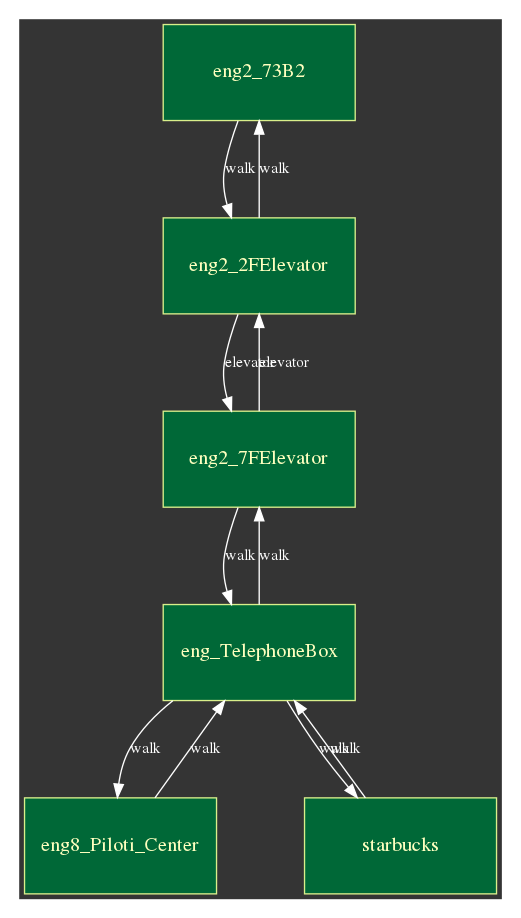 | ||
|
|
||
| A graph is defined by a yaml file ( e.g. [map.yaml in spot_behavior_manager_demo](./spot_behavior_manager_demo/config/map.yaml) ) | ||
| Please see nodes and edges format section below. | ||
|
|
||
| Knowledge representation and execution process of behaviors are separated from actual behavior implementation. | ||
| The iplementation of former is in spot_behavior_manager and spot_behavior_manager_demo, but actual behaviors like walk and elevator are in spot_basic_behaviors. | ||
| behavior_manager_demo node will dynamically load each behaviors defined in map.yaml so you can easilly add your behavior without editing these core implementation. | ||
| Please see spot_basic_behaviors package for behavior examples. | ||
|
|
||
| ## How to use it | ||
|
|
||
| To run demo, please make Spot stand in front of the fiducial in 73B2 and run | ||
|
|
||
| ```bash | ||
| roslaunch spot_behavior_manager_demo demo.launch | ||
| ``` | ||
|
|
||
| ```bash | ||
| $ rostopic pub -1 /spot_behavior_manager_demo/lead_person/goal spot_behavior_manager_msgs/LeadPersonActionGoal "header: | ||
| seq: 0 | ||
| stamp: | ||
| secs: 0 | ||
| nsecs: 0 | ||
| frame_id: '' | ||
| goal_id: | ||
| stamp: | ||
| secs: 0 | ||
| nsecs: 0 | ||
| id: '' | ||
| goal: | ||
| target_node_id: 'eng2_2FElevator'" | ||
| ``` | ||
|
|
||
| Then Spot will go to 2FElevator of eng2 by walk behavior and elevator behavior implemented in spot_basic_behaviors packages. | ||
|
|
||
| https://user-images.githubusercontent.com/9410362/124338016-aad25380-dbe0-11eb-962f-b9a27e1e08cb.mp4 | ||
|
|
||
| For more details, please see [spot_behavior_manager](./spot_behavior_manager), [spot_behavior_manager_demo](./spot_behavior_manager_demo) and each behavior documentation. (e.g. [spot_basic_behaviors](./spot_basic_behaviors) ) |
9 changes: 9 additions & 0 deletions
9
jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/CMakeLists.txt
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,9 @@ | ||
| cmake_minimum_required(VERSION 3.0.2) | ||
| project(spot_basic_behaviors) | ||
|
|
||
| find_package(catkin REQUIRED) | ||
|
|
||
| catkin_python_setup() | ||
|
|
||
| catkin_package( | ||
| ) |
124 changes: 124 additions & 0 deletions
124
jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/README.md
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,124 @@ | ||
| # spot_basic_behaviors | ||
|
|
||
| This package includes exaple implementation of base_behavior for spot_behavior_manager. | ||
|
|
||
| ## walk behavior | ||
|
|
||
| This behavior enables Spot to walk a specified route in a autowalk data from a given waypoint to another waypoint. | ||
|
|
||
| behavior name: `spot_basic_behaviors.walk_behavior.WalkBehavior` | ||
|
|
||
| https://user-images.githubusercontent.com/9410362/124337233-896f6880-dbdc-11eb-9588-30d4a5193bbd.mp4 | ||
|
|
||
| ### Required Configuration | ||
|
|
||
| Before using this behavior, belows are required. | ||
|
|
||
| - autowalk data containing a route for the behavior | ||
| - edge and nodes configuration for the behavior | ||
|
|
||
| #### Edge | ||
|
|
||
| Fields below are required in args of a edge | ||
|
|
||
| - `graph`: path to autowalk data | ||
|
|
||
| e.g. | ||
|
|
||
| ```yaml | ||
| - from: 'eng2_73B2' | ||
| to: 'eng2_73A2' | ||
| behavior_type: 'spot_basic_behavior.walk_behavior.WalkBehavior' | ||
| cost: 10 | ||
| args: | ||
| graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk' | ||
| ``` | ||
| #### Start and End Node | ||
| Fields below are required for nodes | ||
| - `waypoints_on_graph`: list of dict. each dict has `graph`, `id`, `localization_method` | ||
| + `graph`: path to a autowalk data | ||
| + `id`: waypoint id of the start node in the graph | ||
| + `localization_method`: localization_method to be used when starting autowalk, this must be 'fiducial' or 'waypoint' | ||
|
|
||
| e.g. | ||
|
|
||
| ```yaml | ||
| 'eng2_73B2': | ||
| waypoints_on_graph: | ||
| - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk' | ||
| id: 'dyed-bat-t00VKo5XixLihCvpsZPRqw==' | ||
| localization_method: 'fiducial' | ||
| ``` | ||
|
|
||
| ## elevator behavior | ||
|
|
||
| This behavior enables Spot to use an elevator to move to anothor floor. | ||
|
|
||
| behavior name: `spot_basic_behaviors.elevator_behavior.ElevatorBehavior` | ||
|
|
||
| https://user-images.githubusercontent.com/9410362/124337679-cd636d00-dbde-11eb-8db9-c5fedfda4ad9.mp4 | ||
|
|
||
| ### Required Configuration | ||
|
|
||
| Before using this behavior, belows are required. | ||
|
|
||
| - autowalk data containing a route for the behavior. | ||
| - apriltag pose information for elevator door frame detection. | ||
| - edge and nodes configuration for the behavior | ||
|
|
||
| #### autowalk data | ||
|
|
||
| To use this behavior, you need to record autowalk data while Spot riding on the elevator and getting off. | ||
|
|
||
| Here is an example. | ||
|
|
||
| 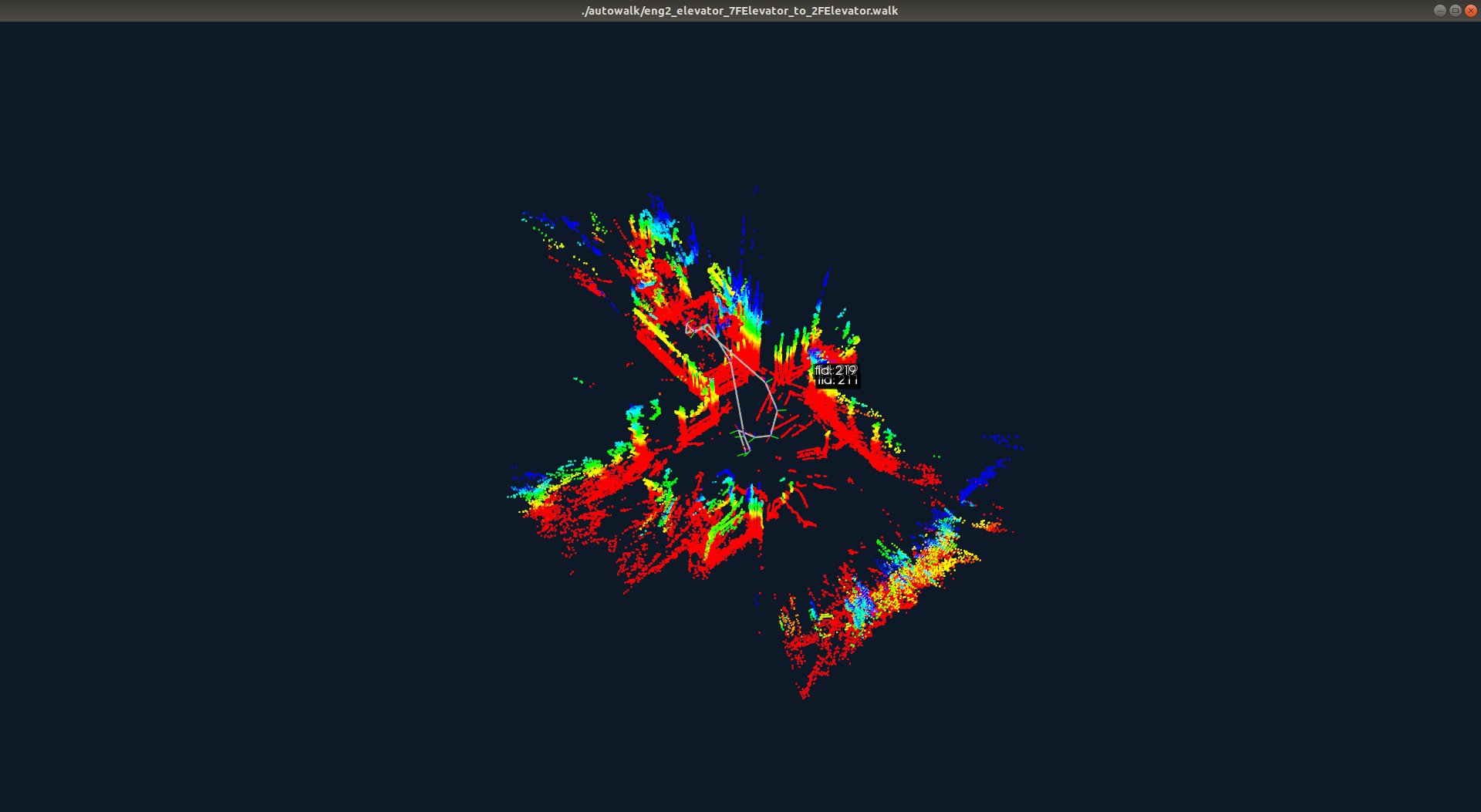 | ||
|
|
||
| #### apriltag pose information | ||
|
|
||
| To use this behavior, an Fiducial (april tag) must be placed on the wall near the elevator doors. | ||
| And for elevator door opening and closing detection, transform from elevator foor frame ( center point on the ground ) to the fiducial is required. | ||
| Please see https://github.com/sktometometo/jsk_robot/blob/b166ef04cb954b175bedd5653af808be35e42121/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/tags.yaml#L44-L54 for examples | ||
|
|
||
| #### Edge | ||
|
|
||
| Fields below are required in args of a edge | ||
|
|
||
| - `graph`: path to autowalk data | ||
| - `rest_waypoint_id`: waypoint of rest position in a elevator | ||
|
|
||
| e.g. | ||
|
|
||
| ```yaml | ||
| - from: 'eng2_7FElevator' | ||
| to: 'eng2_2FElevator' | ||
| behavior_type: 'spot_basic_behavior.elevator_behavior.ElevatorBehavior' | ||
| cost: 10 | ||
| args: | ||
| graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk' | ||
| rest_waypoint_id: 'unsaid-collie-jvatvS.7KX9jpzQz61GL4A==' | ||
| ``` | ||
|
|
||
| #### Start and End Node | ||
|
|
||
| Fields below are required for nodes | ||
|
|
||
| - `waypoints_on_graph`: list of dict. each dict has `graph`, `id`, `localization_method` | ||
| + `graph`: path to a autowalk data | ||
| + `id`: waypoint id of the start node in the graph | ||
| + `localization_method`: localization_method to be used when starting autowalk, this must be 'fiducial' or 'waypoint' | ||
| - `switchbot_device`: switchbot device name for elevator button | ||
|
|
||
| e.g. | ||
|
|
||
| ```yaml | ||
| 'eng2_7FElevator': | ||
| waypoints_on_graph: | ||
| - graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk' | ||
| id: 'sly-chetah-IZ4pVY7vrqO36OoKCYk9Zg==' | ||
| localization_method: 'fiducial' | ||
| switchbot_device: '/eng2/7f/elevator/down/button' | ||
| ``` |
9 changes: 9 additions & 0 deletions
9
jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/settings.yaml
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,9 @@ | ||
| tag_family: 'tag36h11' # options: tagStandard52h13, tagStandard41h12, tag36h11, tag25h9, tag16h5, tagCustom48h12, tagCircle21h7, tagCircle49h12 | ||
| tag_threads: 2 # default: 2 | ||
| tag_decimate: 1.0 # default: 1.0 | ||
| tag_blur: 0.0 # default: 0.0 | ||
| tag_refine_edges: 1 # default: 1 | ||
| tag_debug: 0 # default: 0 | ||
| max_hamming_dist: 2 # default: 2 (Tunable parameter with 2 being a good choice - values >=3 consume large amounts of memory. Choose the largest value possible.) | ||
| # Other parameters | ||
| publish_tf: true # default: false |
54 changes: 54 additions & 0 deletions
54
jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/tags.yaml
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,54 @@ | ||
| # # Definitions of tags to detect | ||
| # | ||
| # ## General remarks | ||
| # | ||
| # - All length in meters | ||
| # - Ellipsis (...) signifies that the previous element can be repeated multiple times. | ||
| # | ||
| # ## Standalone tag definitions | ||
| # ### Remarks | ||
| # | ||
| # - name is optional | ||
| # | ||
| # ### Syntax | ||
| # | ||
| # standalone_tags: | ||
| # [ | ||
| # {id: ID, size: SIZE, name: NAME}, | ||
| # ... | ||
| # ] | ||
| standalone_tags: | ||
| [ | ||
| ] | ||
| # ## Tag bundle definitions | ||
| # ### Remarks | ||
| # | ||
| # - name is optional | ||
| # - x, y, z have default values of 0 thus they are optional | ||
| # - qw has default value of 1 and qx, qy, qz have default values of 0 thus they are optional | ||
| # | ||
| # ### Syntax | ||
| # | ||
| # tag_bundles: | ||
| # [ | ||
| # { | ||
| # name: 'CUSTOM_BUNDLE_NAME', | ||
| # layout: | ||
| # [ | ||
| # {id: ID, size: SIZE, x: X_POS, y: Y_POS, z: Z_POS, qw: QUAT_W_VAL, qx: QUAT_X_VAL, qy: QUAT_Y_VAL, qz: QUAT_Z_VAL}, | ||
| # ... | ||
| # ] | ||
| # }, | ||
| # ... | ||
| # ] | ||
| tag_bundles: | ||
| [ | ||
| { | ||
| name: 'elevator_door_frame_raw', | ||
| layout: | ||
| [ | ||
| {id: 219, size: 0.146, x: -1.7, y: -1.0, z: 0.6, qx: 0.0, qy: 0.7071067811865475, qz: 0.7071067811865476, qw: 0.0, }, | ||
| {id: 211, size: 0.146, x: -1.7, y: -1.0, z: 0.4, qx: 0.0, qy: 0.7071067811865475, qz: 0.7071067811865476, qw: 0.0, }, | ||
| ] | ||
| } | ||
| ] |
1 change: 1 addition & 0 deletions
1
jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/switchbot_ros/token.yaml
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1 @@ | ||
| token: XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX |
Oops, something went wrong.