-
Notifications
You must be signed in to change notification settings - Fork 16
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Merge pull request #27 from chikuta/support-fw-1.2.1.5
Support fw 1.2.1.5
- Loading branch information
Showing
9 changed files
with
427 additions
and
65 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -12,18 +12,24 @@ M5 stack library for cybergear | |
|
|
||
| * M5Stack Basic V2.7 | ||
|
|
||
| ## H/W Components | ||
| ## H/W Components (MCP2515) | ||
|
|
||
| * [Xiaomi Cybergear](https://www.mi.com/cyber-gear) | ||
| * [M5Stack Basic V2.7](https://shop.m5stack.com/collections/m5-controllers/products/esp32-basic-core-lot-development-kit-v2-7) | ||
| * [M5Stack Commu module \[M001\]](https://shop.m5stack.com/products/commu-module) | ||
| * [XT30(2+2)-F](https://www.china-amass.com/product/contain/1Yf5h7G4u1927079) | ||
| * [Grove Cable](https://www.seeedstudio.com/Grove-Universal-4-Pin-Buckled-20cm-Cable-5-PCs-pack.html) | ||
|
|
||
| ## H/W Connection | ||
|
|
||
| 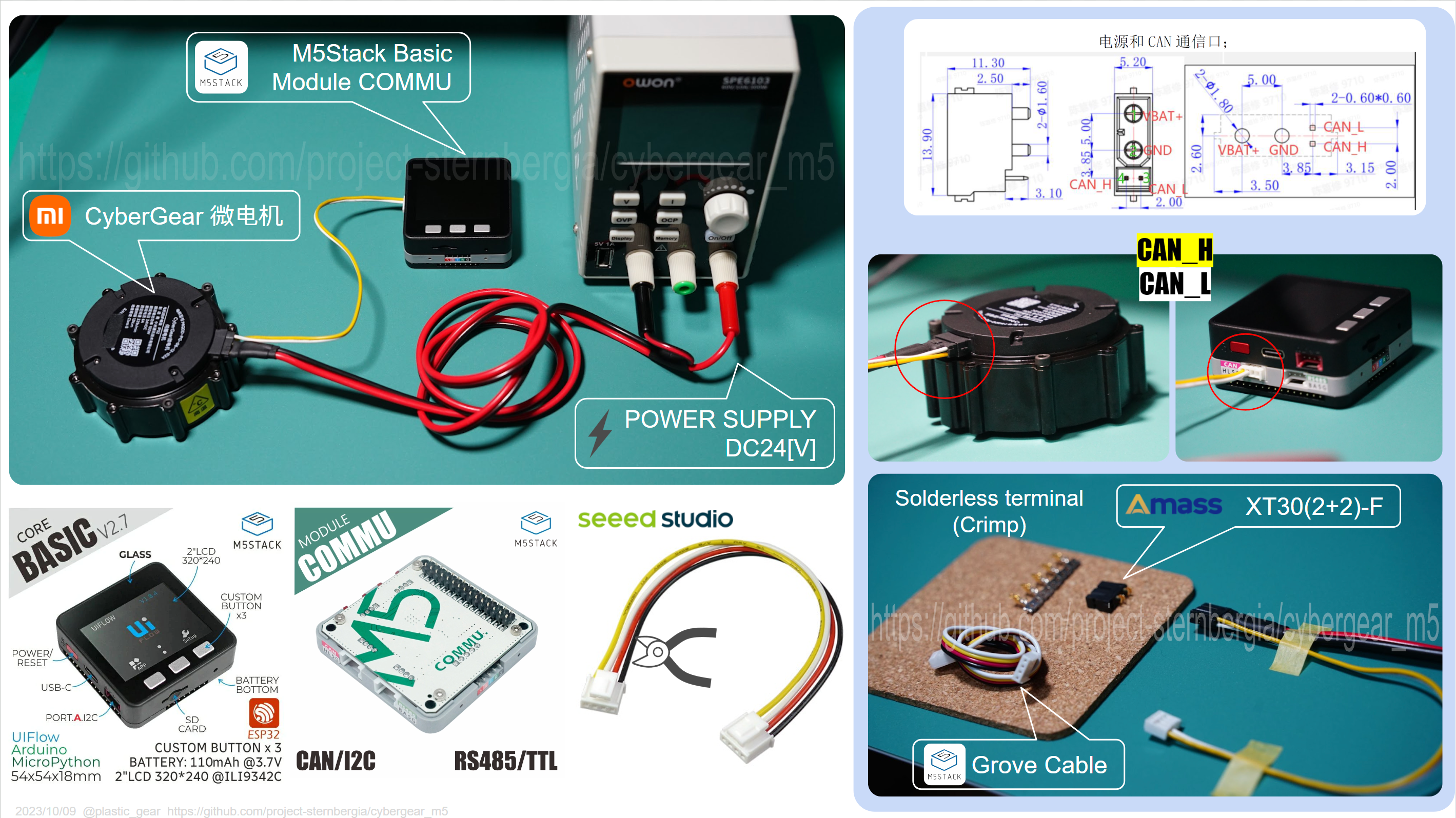 | ||
|
|
||
| ## H/W Components (ESP32 + CAN Transceiver Unit) | ||
|
|
||
| * [Xiaomi Cybergear](https://www.mi.com/cyber-gear) | ||
| * [M5Stack Basic V2.7](https://shop.m5stack.com/collections/m5-controllers/products/esp32-basic-core-lot-development-kit-v2-7) | ||
| * [LAN Module W5500 with PoE V12](https://shop.m5stack.com/products/lan-module-w5500-with-poe-v12) or [CANBus Unit(CA-IS3050G)](https://shop.m5stack.com/products/canbus-unitca-is3050g) | ||
| * [XT30(2+2)-F](https://www.china-amass.com/product/contain/1Yf5h7G4u1927079) | ||
| * [Grove Cable](https://www.seeedstudio.com/Grove-Universal-4-Pin-Buckled-20cm-Cable-5-PCs-pack.html) | ||
|
|
||
| ## How to use Official GUI tool | ||
|
|
||
| This software requires a specific CAN to USB module. | ||
|
|
@@ -47,6 +53,7 @@ Tested(for reference): | |
| cd ~/Arduino/libraries | ||
| git clone https://github.com/coryjfowler/MCP_CAN_lib.git | ||
| git clone https://github.com/Locoduino/RingBuffer.git | ||
| git clone [email protected]:project-sternbergia/arduino-CAN.git | ||
| git clone https://github.com/project-sternbergia/cybergear_m5.git | ||
| ``` | ||
|
|
||
|
|
@@ -84,7 +91,7 @@ After that write [cybergear_m5/examples/cybergear_bilateral.ino](https://github. | |
|
|
||
| ## References | ||
|
|
||
| * Xiaomi Cybergear 微电机使用说明书 | ||
| * [Xiaomi Cybergear 微电机使用说明书](https://web.vip.miui.com/page/info/mio/mio/detail?postId=40233100) | ||
|
|
||
| ## LICENSE | ||
|
|
||
|
|
||
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,72 @@ | ||
| #include <Arduino.h> | ||
| #include <M5Stack.h> | ||
| #include "cybergear_driver.hh" | ||
|
|
||
| #define USE_ESP32_CAN | ||
| #ifdef USE_ESP32_CAN | ||
| #include "cybergear_can_interface_esp32.hh" | ||
| #else | ||
| #include "cybergear_can_interface_mcp.hh" | ||
| #endif | ||
|
|
||
| // setup master can id and motor can id (default cybergear can id is 0x7F) | ||
| uint8_t MASTER_CAN_ID = 0x00; | ||
| uint8_t MOT_CAN_ID = 0x7F; | ||
|
|
||
| // init cybergeardriver | ||
| CybergearDriver driver = CybergearDriver(MASTER_CAN_ID, MOT_CAN_ID); | ||
|
|
||
| #ifdef USE_ESP32_CAN | ||
| CybergearCanInterfaceEsp32 interface; | ||
| #else | ||
| CybergearCanInterfaceMcp interface; | ||
| #endif | ||
|
|
||
| void setup() | ||
| { | ||
| M5.begin(true, false, true); | ||
|
|
||
| // init cybergear driver | ||
| M5.Lcd.printf("Start read write motor param test\n"); | ||
|
|
||
| interface.init(); | ||
| driver.init(&interface); | ||
| driver.init_motor(MODE_POSITION); | ||
| delay(1000); | ||
| driver.enable_motor(); | ||
| } | ||
|
|
||
| void loop() | ||
| { | ||
| M5.update(); | ||
|
|
||
| // get motor parameter | ||
| driver.set_position_ref(0.0f); | ||
| driver.dump_motor_param(); | ||
| driver.process_packet(); | ||
|
|
||
| MotorParameter param = driver.get_motor_param(); | ||
| M5.Lcd.fillScreen(BLACK); | ||
| M5.Lcd.setCursor(0, 0); | ||
| M5.Lcd.printf("Received motor param\n"); | ||
| M5.Lcd.printf(" stamp : %u\n", param.stamp_usec); | ||
| M5.Lcd.printf(" run_mode : %d\n", param.run_mode); | ||
| M5.Lcd.printf(" iq_ref : %f\n", param.iq_ref); | ||
| M5.Lcd.printf(" spd_ref : %f\n", param.spd_ref); | ||
| M5.Lcd.printf(" limit_torque : %f\n", param.limit_torque); | ||
| M5.Lcd.printf(" cur_kp : %f\n", param.cur_kp); | ||
| M5.Lcd.printf(" cur_ki : %f\n", param.cur_ki); | ||
| M5.Lcd.printf(" cur_filt_gain : %f\n", param.cur_filt_gain); | ||
| M5.Lcd.printf(" loc_ref : %f\n", param.loc_ref); | ||
| M5.Lcd.printf(" limit_spd : %f\n", param.limit_spd); | ||
| M5.Lcd.printf(" limit_cur : %f\n", param.limit_cur); | ||
| M5.Lcd.printf(" mech_pos : %f\n", param.mech_pos); | ||
| M5.Lcd.printf(" iqf : %f\n", param.iqf); | ||
| M5.Lcd.printf(" mech_vel : %f\n", param.mech_vel); | ||
| M5.Lcd.printf(" vbus : %f\n", param.vbus); | ||
| M5.Lcd.printf(" rotation : %d\n", param.rotation); | ||
| M5.Lcd.printf(" loc_kp : %f\n", param.loc_kp); | ||
| M5.Lcd.printf(" spd_kp : %f\n", param.spd_kp); | ||
| M5.Lcd.printf(" spd_ki : %f\n", param.spd_ki); | ||
| delay(5000); | ||
| } |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Oops, something went wrong.