This testbed includes:
- ROS packages for multi-robot exploration
- MORSE simulation scenarios
- Scripts for autonomous deployment of the infrastructure and experiments (computer cluster required)
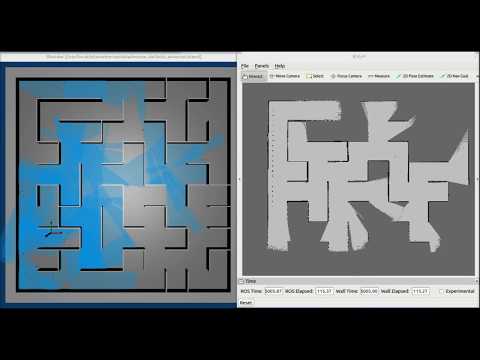
To have a general idea, please refer to the videos below, respectively showing simulated and real robot exploration:

{kind=link}
If you are considering using these resources, please reference the following:
@article{yz17robotics,
author = {Zhi Yan and Luc Fabresse and Jannik Laval and Noury Bouraqadi},
title = {Building a ROS-based Testbed for Realistic Multi-robot Simulation: Taking the Exploration as an Example},
year = {2017},
journal = {Robotics},
volume = {6},
number = {3},
pages = {1--21}
}

The testbed is composed of four parts: a simulator, a monitor, a set of robot controllers, and the ROS middleware used to connect all of them. In particular, we use the MORSE 3D realistic simulator and wrap it up into a ROS node. The monitor is also performed as a ROS node, which allows us to supervise the experimental processes. Specifically, it can stop the experiment when the stop condition is triggered, collect measurement data and compute the metrics afterwards.
- ROS Groovy or +
- MORSE 1.2 or +