Keyboard Teleoperation
The keyboard teleoperation is an alphanumeric user interface that can be used by the user to teleoperate the robot using the keyboard.
To launch the keyboard teleoperation viewer (for example, for the robot namespace drone7), the command is:
$ roslaunch keyboard_teleoperation_with_pid_control keyboard_teleoperation_with_pid_control.launch --wait drone_id_namespace:=drone7
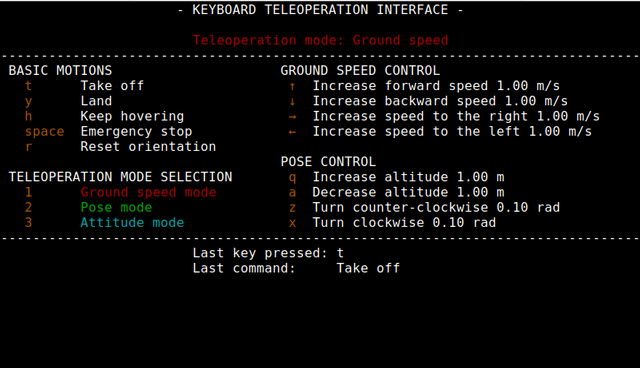
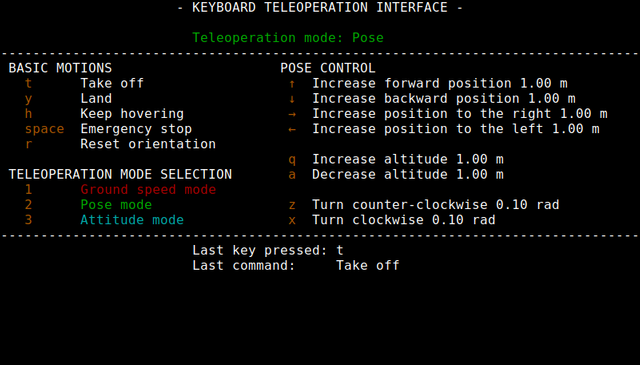
This interface is presented in a window terminal and admits three different control modes: ground speed, pose and attitude. These modes can be selected by pressing respectively the keys 1, 2 or 3. The meaning of the pressed keys change according to the control mode as it is described by each screen as it is presented below:

Contact: We thank and welcome any suggestion or comment about Aerostack. For any question or bug report you can read and/or write at the issues page. You can also contact the team support at the following address: [email protected]
The content of the Aerostack wiki is licensed under Creative Commons license CC BY 4.0