Introduction
These experiments address two parts of the ToL life cycle: lifetime learning, where the robots optimize their controller to suit their body plan, and evolution of morphology, where robots autonomously exchange genotypes –schematics of theirs body structure– to combine into a new individual. Entire system consists of three phases:
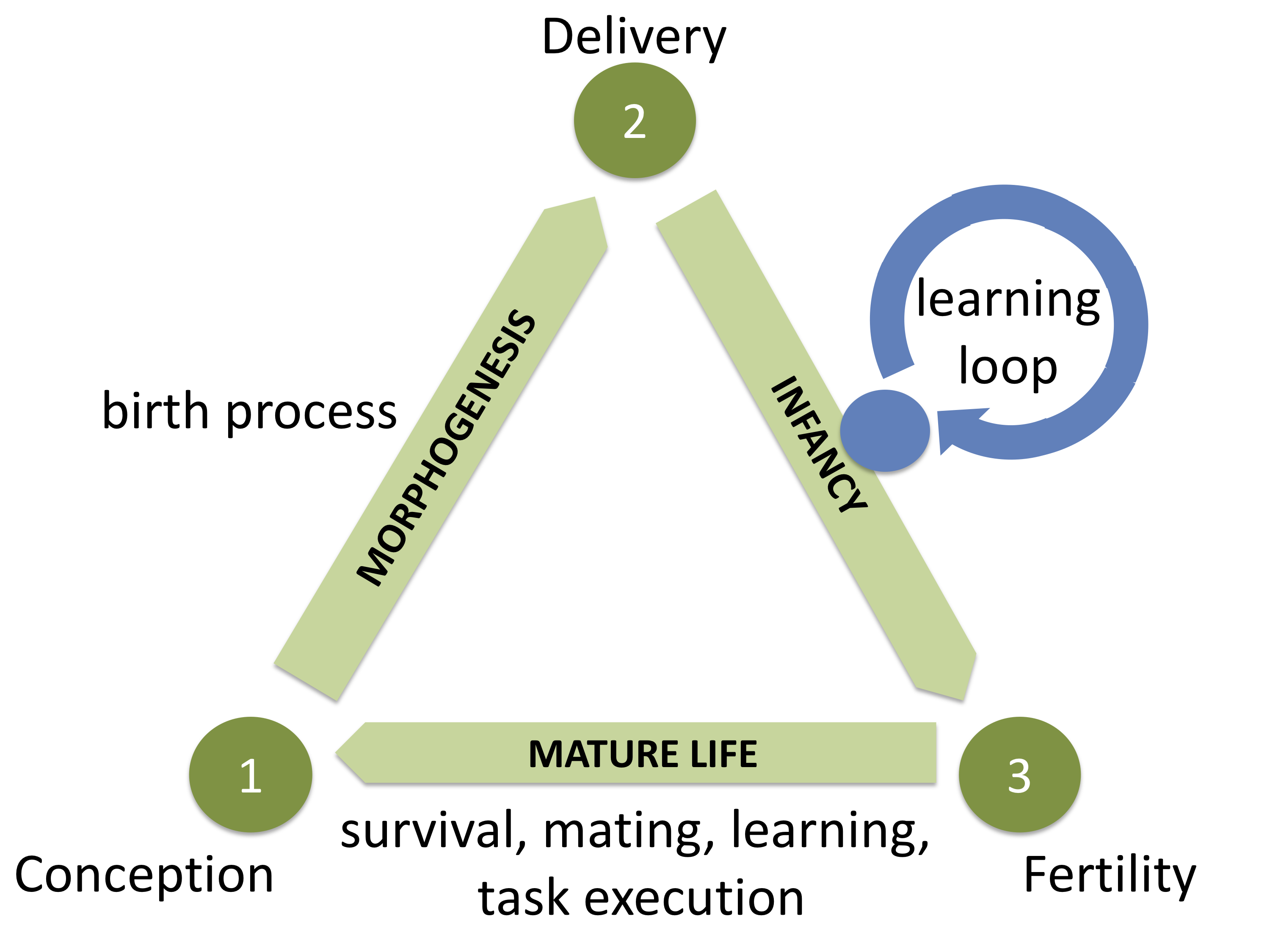
Phase 1: Conception. The component parts of individual robot, based on predefined genotype (robot blueprint), can be printed and assembled using 3D printer;
Phase 2: Delivery. Robots with predefined shapes are placed in a small arena. Because their controllers are randomly initialized, their first task is to learn effective locomotive behaviour. The robots are equipped with a photocell that allows them to detect a light source placed at the edge of the arena. The robots can gauge the efficacy of their controllers by monitoring the intensity of the light source. If the robots succeed in learning locomotion, they will reach the light source. Once they are close enough (again indicated by light intensity), they are deemed ‘fit’ and ‘mature’ enough to procreate and start communicating to exchange genetic material.
Phase 3: Fertility. The component parts of that new individual can then be printed and assembled and the resulting robot can be placed into the arena, closing the loop and allowing for evolution to adapt the robot popu- lation to the environment.
See next: Installation requirements for Gazebo